Download
1 / 13
130 likes | 274 Views
Hybrid automata and temporal logics. Anders P. Ravn Department of Computer Science, Aalborg University, Denmark. Hybrid Systems – PhD School Aalborg University January 2007. 9:30 -10:00 10:10 -10:30 10:40 -11:20 11:30 -12:00. Hybrid Automata Abstraction/Refinement Temporal Logics

E N D
Hybrid automata and temporal logics Anders P. Ravn Department of Computer Science, Aalborg University, Denmark Hybrid Systems – PhD School Aalborg University January 2007
9:30 -10:00 10:10 -10:30 10:40 -11:20 11:30 -12:00 Hybrid Automata Abstraction/Refinement Temporal Logics Model Checking Plan
Hybrid System A dynamical system with a non-trivial interaction of discrete and continuous dynamics • autonomous • switches • jumps • controlled • switches • jump • between manifolds • (Branicky 1995)
Why are we here? "Control Engineers will have to master computer and software technologies to be able to build the systems of the future, and software engineers need to use control concepts to master ever-increasing complexity of computing systems.” (IFAC Newsletter December 2005 No.6)
Hybrid Systems in Control(take up of CS ideas 1990 - …) • Hybrid Automata is the Spec. Language • Tools for simulation and model checking (Henzinger,Alur,Maler,Dang, …) • Bisimulation as abstraction technique (Pappas,Neruda,Koo, …) • Industrial Applications
Hybrid Automaton - Syntax X = {x1, … xn} - variables (V, E) – control graph init: V pred(X) inv: V pred(X) flow: V pred(X X) jump: E pred(X X´) event: E . x´ = x-1
a posta(R) = { q’ | q R and q q’} prea(R) = { q | q’ R and q q’} a Labelled Transition System Q –states, e.g. (v=”Off”,x = 17.5) Q0– initial states, Q0 Q A –labels – transition relation, Q A Q
x’ = x-1 { (v,x) – (v,x’) | R0and f: (0,) Rn s.t. f is diff. and f(0) = x and f() = x’ and flow(v)[X := f(t), X:= f(t)], t (0,)} . . Transition Semantics of HA X = {x1, … xn} - variables (V, E) – control graph init: V pred(X) inv: V pred(X) flow: V pred(X X) jump: E pred(X X’) event: E . Q - states – {(v,x) | v V and inv(v)[X := x]} Q0– initial states - {(v,x) Q | init(v)[X := x]} A - labels - R0 { (v,x) – (v’,x’) | e E(v,v’)and event(e) = and jump(e) [X := x]}
Trace Semantics Q - states, {(v,x) | v V and inv(v)[X := x]} Q0– initial states, … A - labels R0 - transition relation, Q A Q Trajectory: = <(a0,q0)…(ai,qi)…> where q0 Q0 and qi–aiqi+1, i 0 • Live Transition System: (S, L = { | infinite from S}) • Machine Closed: finite from S, prefix(L) • Duration of is sum of time labels. • S is non-Zeno: duration of L diverges, Machine closed
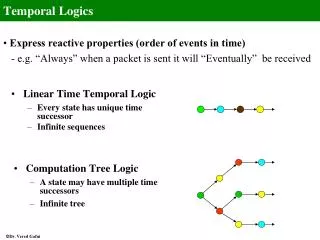
Computation tree: = q00 a q10 q11 ... q1n1 … q200 q201 q210 q211 q13 Tree Semantics Q - states, {(v,x) | v V and inv(v)[X := x]} Q0– initial states, … A - labels, … - transition relation, Q A Q
X = {x1, … xn} - variables (V, E) – control graph init: V pred(X) inv: V pred(X) flow: V pred(X X) jump: E pred(X X’) event: E . x’ = x-1 Classes of Hybrid Automata . • Rectangular init, inv, flow (x Iflow), • jump (x = x,y I, x’ I’ ,y’=y) • Singular – rectangular with Iflow a point • Timed – singular with Iflow = [1,1]n • Multirectangular … • Triangular … • Stopwatch … Verification results pp. 11-12
Composition of Transition Systems Q - states Q0– initial states, … A - labels, … - transition relation, Q A Q S = S1 || S2 with : A1 A2 A Q = Q1 Q2 Q0 = Q10 Q20 (q1,q2) –a (q1’,q2’) iff (qi –ai qi’, i=1,2 and a = a1a2 is defined Remark p 7
Summary • Hybrid Atomata – Finite description through an intuitive syntax • Clear semantics through Transition Systems • Composition • Specialization through restrictions on flow equations • How to analyze them ?