Download
1 / 15
150 likes | 315 Views
Barn Scraper. Justin Heyer Ted Keppner. Problem Statement. Build an autonomous barn floor scrapper Needs to be able to be adapted to multiple barns Solutions to clean either slotted/solid floor Have an obstacle/cow detection system User friendly Low maintenance . Industrial Solutions.

E N D
Barn Scraper Justin Heyer Ted Keppner
Problem Statement • Build an autonomous barn floor scrapper • Needs to be able to be adapted to multiple barns • Solutions to clean either slotted/solid floor • Have an obstacle/cow detection system • User friendly • Low maintenance
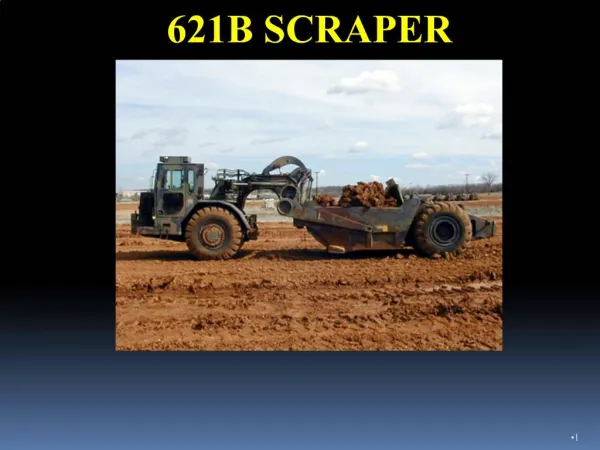
Industrial Solutions • There are several different robot powered barn scraper systems commercially available today. • Companies marketing Robotic Scrapers include • DeLaval • Joz Tech • SR One • Lely • Most of these systems are designed around slotted flooring that the manure will drop through.
Starting ,what’s out there? What we have. Key Commercial specs • Already existing MARV unit software for testing • Knowledge of preexisting MARV systems • Knowledge of sensor systems used for navigation • Multiple systems have a weight of approx. 800 lbs for traction purposes • Common speed for commercial systems is approx 12 ft/min • Ability to push around 220 lbs
What is needed to be done? • Need to modify and improve upon the existing MARV software. • Design and build a Commercial Robot unit that is strong enough to be implemented into an barn environment
Mechanical Systems • Size and design platform to mount plow, motors, wheels, and electronic controllers • Size and build plow swivel front • Size and design the motors and wheels • Build housing for protective purposes around electronic components
Electrical Systems • Two motors for drive wheels • Current monitoring for drive wheels • Motor controllers • Other obstacle detection sensors • Navigation System sensors • Electronic Compass • Wheel Encoders • Sonic Sensors Current measuring Subsystem: Hall effect sensor system separate from the motor controllers.
Software System • Sonar to sense how far we are from wall • Easy design for mounting and replacement • Already some protection from elements.
Drag Behind Rotary Encoder • Will be bolted to rear of frame. • Potentiometer for angular direction. • Wheel for distance measurement. • Spring to apply pressure to the wheel to keep it rolling on the ground.
Basic Software Navigation Holding Pen Stalls Stalls Home (0,0) 1 2 3 4 5 6 7 y 8 x 13 12 11 10 9 8 7 6 5 4 3 2 1
Other electromechanical systems • Obstacle detection and avoidance • Hand held controller for manual operation • Emergency switches for safety reasons • Docking station for a safe parking and charging
Electrical system diagram Accepts input from micro to drive motors Micro Controller Accepts input from decoder and sensors to drive motor controller Input Decoder Motor Controller Decodes sensor inputs and translates it into data more easily interpreted by the micro. Sensor Input Driven by micro, sends output to software interrupts
Mechanical Subsystems MARV frame Plow Used as carrier for plow and motors Used to plow manure Motors Drive the Robot
Work Breakup Justin Ted • Research • Design • Preliminary Testing • Wiring • Docking/Controller Fab • Plow Fabrication • Frame Fabrication • Research • Design • Preliminary Testing • Wiring • Docking/Controller Fab • Navigation System design • Sensor Implementation