Download
1 / 1
10 likes | 141 Views
Modular Robotic Video Sensor Brick Implementation for Under Vehicle Inspection and General Surveillance. Objective/Operational Capabilities.

E N D
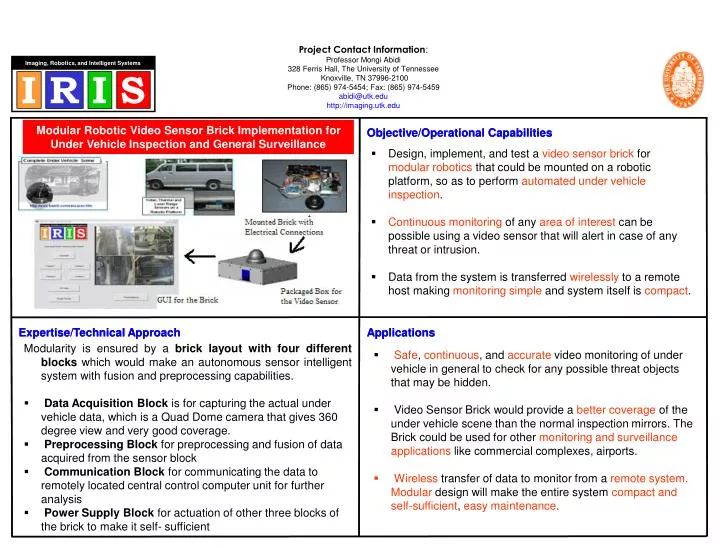
Modular Robotic Video Sensor Brick Implementation for Under Vehicle Inspection and General Surveillance Objective/Operational Capabilities • Design, implement, and test a video sensor brick for modular robotics that could be mounted on a robotic platform, so as to perform automated under vehicle inspection. • Continuous monitoring of any area of interest can be possible using a video sensor that will alert in case of any threat or intrusion. • Data from the system is transferred wirelessly to a remote host making monitoring simple and system itself is compact. Expertise/Technical Approach Applications • Modularity is ensured by a brick layout with four different blocks which would make an autonomous sensor intelligent system with fusion and preprocessing capabilities. • Data Acquisition Block is for capturing the actual under vehicle data, which is a Quad Dome camera that gives 360 degree view and very good coverage. • Preprocessing Block for preprocessing and fusion of data acquired from the sensor block • Communication Block for communicating the data to remotely located central control computer unit for further analysis • Power Supply Block for actuation of other three blocks of the brick to make it self- sufficient • Safe, continuous, and accurate video monitoring of under vehicle in general to check for any possible threat objects that may be hidden. • Video Sensor Brick would provide a better coverage of the under vehicle scene than the normal inspection mirrors. The Brick could be used for other monitoring and surveillance applications like commercial complexes, airports. • Wireless transfer of data tomonitor from a remote system. Modular design will make the entire system compact and self-sufficient, easy maintenance.