Download
1 / 1

E N D
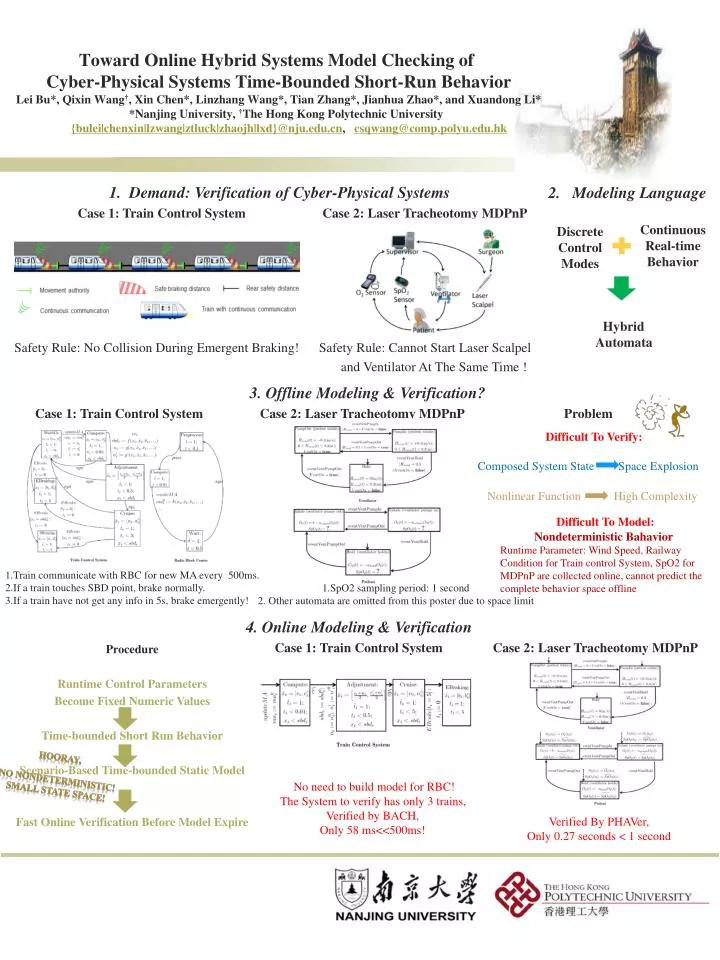
Toward Online Hybrid Systems Model Checking of Cyber-Physical Systems Time-Bounded Short-Run BehaviorLei Bu*, Qixin Wang†, Xin Chen*, Linzhang Wang*, Tian Zhang*, Jianhua Zhao*, and Xuandong Li* *Nanjing University, †The Hong Kong Polytechnic University{bulei|chenxin|lzwang|ztluck|zhaojh|lxd}@nju.edu.cn, csqwang@comp.polyu.edu.hk 1. Demand: Verification of Cyber-Physical Systems Case 1: Train Control System Case 2: Laser Tracheotomy MDPnP Safety Rule: No Collision During Emergent Braking! Safety Rule: Cannot Start Laser Scalpel and Ventilator At The Same Time ! 2. Modeling Language Continuous Real-time Behavior Discrete Control Modes Hybrid Automata 3. Offline Modeling & Verification? Case 1: Train Control System Case 2: Laser Tracheotomy MDPnP Problem Difficult To Verify: Composed System State Space Explosion Nonlinear Function High Complexity Difficult To Model: Nondeterministic Bahavior Runtime Parameter: Wind Speed, Railway Condition for Train control System, SpO2 for MDPnP are collected online, cannot predict the complete behavior space offline 1.Train communicate with RBC for new MA every 500ms. 2.If a train touches SBD point, brake normally. 3.If a train have not get any info in 5s, brake emergently! 1.SpO2 sampling period: 1 second 2. Other automata are omitted from this poster due to space limit 4. Online Modeling & Verification Case 1: Train Control System Case 2: Laser Tracheotomy MDPnP Procedure Runtime Control Parameters Become Fixed Numeric Values Time-bounded Short Run Behavior Scenario-Based Time-bounded Static Model Fast Online Verification Before Model Expire Hooray, No Nondeterministic! Small State space! No need to build model for RBC!The System to verify has only 3 trains, Verified by BACH, Only 58 ms<<500ms! Verified By PHAVer, Only 0.27 seconds < 1 second