Download
1 / 1
30 likes | 211 Views
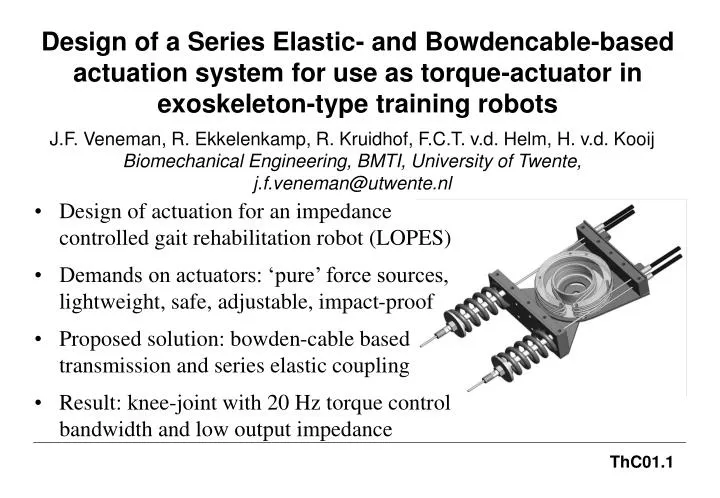
Design of a Series Elastic- and Bowdencable-based actuation system for use as torque-actuator in exoskeleton-type training robots. J.F. Veneman, R. Ekkelenkamp, R. Kruidhof, F.C.T. v.d. Helm, H. v.d. Kooij Biomechanical Engineering, BMTI, University of Twente, j.f.veneman@utwente.nl.

E N D
Design of a Series Elastic- and Bowdencable-based actuation system for use as torque-actuator in exoskeleton-type training robots J.F. Veneman, R. Ekkelenkamp, R. Kruidhof, F.C.T. v.d. Helm, H. v.d. Kooij Biomechanical Engineering, BMTI, University of Twente,j.f.veneman@utwente.nl • Design of actuation for an impedance controlled gait rehabilitation robot (LOPES) • Demands on actuators: ‘pure’ force sources, lightweight, safe, adjustable, impact-proof • Proposed solution: bowden-cable based transmission and series elastic coupling • Result: knee-joint with 20 Hz torque control bandwidth and low output impedance ThC01.1