Download
1 / 15
150 likes | 304 Views
Design of an Integrated Robot Simulator for Learning Applications. Brendon Wilson April 15th, 1999. Outline. Introduction Design Tools and Techniques Overview of Simulation Architecture Feature Set Demonstration The Future of REMOTE Summary Questions. Introduction.

E N D
Design of an Integrated Robot Simulator for Learning Applications Brendon Wilson April 15th, 1999
Outline • Introduction • Design Tools and Techniques • Overview of Simulation Architecture • Feature Set • Demonstration • The Future of REMOTE • Summary • Questions
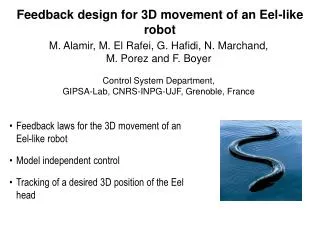
Introduction • Scope of REMOTE project • Remote experimentation for tele-learning • Prime audience: ENSC 489 students • Target experiment: Scorbot ER-III • Scope of Thesis • Simulation platform for Scorbot • Flexible and maintainable architecture for future additions
Design Tools and Techniques • Design Patterns • Provide abstractions to maintain flexibility • “Ready-made” solutions • Creational, structural, or behavioral • Unified Modeling Language • Documentation of design • Java • Implementation language • Platform independent
Solution to Typical Problem • File Parsers for Simulation Engine • Responsible for parsing 3D models, robot configuration, simulation files • Should be replaceable without changing core application • Program to interface not implementation • Externally configurable
Feature Set • Re-configurable robot simulation • configure model using Denavit-Hartenberg parameters • replaceable inverse kinematics and interpolation modules • Replaceable Architecture Components • File Parsers: 3D Models, Simulation Language, Robot Configuration Language • Full Internationalization • Images, error messages, menus
The Future of REMOTE • Integration with REMOTE robot server • Integration on new Java3D Loaders • Simulation of multiple robots • Possibilities for manipulators • CAD/CAM machinery • General Inverse Kinematics Engine • Additions to the user interface • Other possible applications?
Summary • Functional Scorbot simulator ready for integration with remote-experiment server • Most functions of simulation engine replaceable without alterations to existing code base • Simulation architecture simple enough that new features can be added without major overhaul of existing code