Download

1 / 13
130 likes | 290 Views
Robot C and Natural Language. Create a folder. Create a folder on your desktop to insert all your Robot C files, Here you will begin with your template and other basic programs, Immediately change the name of your modified file!. PLTW Template. Begin with PLTW template. RobotC files.

E N D
Create a folder • Create a folder on your desktop to insert all your Robot C files, • Here you will begin with your template and other basic programs, • Immediately change the name of your modified file!
PLTW Template Begin with PLTW template RobotC files Test 1 Save in
Change the name to TEST 1 Save in your desktop folder
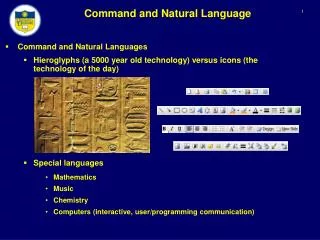
Check: Cortex Schematic This information should match the motor and sensors setup done in ROBOTC lineFollower potentiometer leftMotor bumpSwitch rightMotor touchSwitch clawMotor
Check: Motors • 2-wire motors can be connected directly to ports 1 and 10 on the VEX Cortex • The VEX Motor Controller 29 allows you to connect the VEX 2-wire Motors to any of the standard 3-wire ports on the VEX Cortex. • To use the VEX Motor Controller 29, plug the 3-wire end into one of the MOTOR ports (2-9) on your VEX Cortex Microcontroller.
ROBOTC - Programming Check: 3. Complete Motor and Sensor Setup Allows you to configure and name all of the motors and sensors connected to your robot.
Analog Sensor Setup Check: Type a name to describe the sensor. Choose the type of sensor – the only analog sensors for GTT are Line Follower and Potentiometer.
Check: Sensor Setup Type a name to describe the digital sensor location or purpose. Both the limit and bumper switches are Touch Type. LED’s can be plugged in to dgtl9-dgtl12, the type is Digital Out.
Try such program Practice with bump switch: untilBump(bumpSwitch,5); wait(.5); startMotor(leftMotor,127); startMotor(rightMotor,-127); untilBump(bumpSwitch);