Download
1 / 9
90 likes | 123 Views
Recall the methods for determining surface areas using vector calculus concepts. Learn about parallelogram areas, parametrized surfaces, and applying surface integrals. Explore examples involving spheres and elliptical cylinders to deepen your understanding. Discover how to calculate precise surface areas and review key theorems like Green's and Stokes' Theorems.

E N D
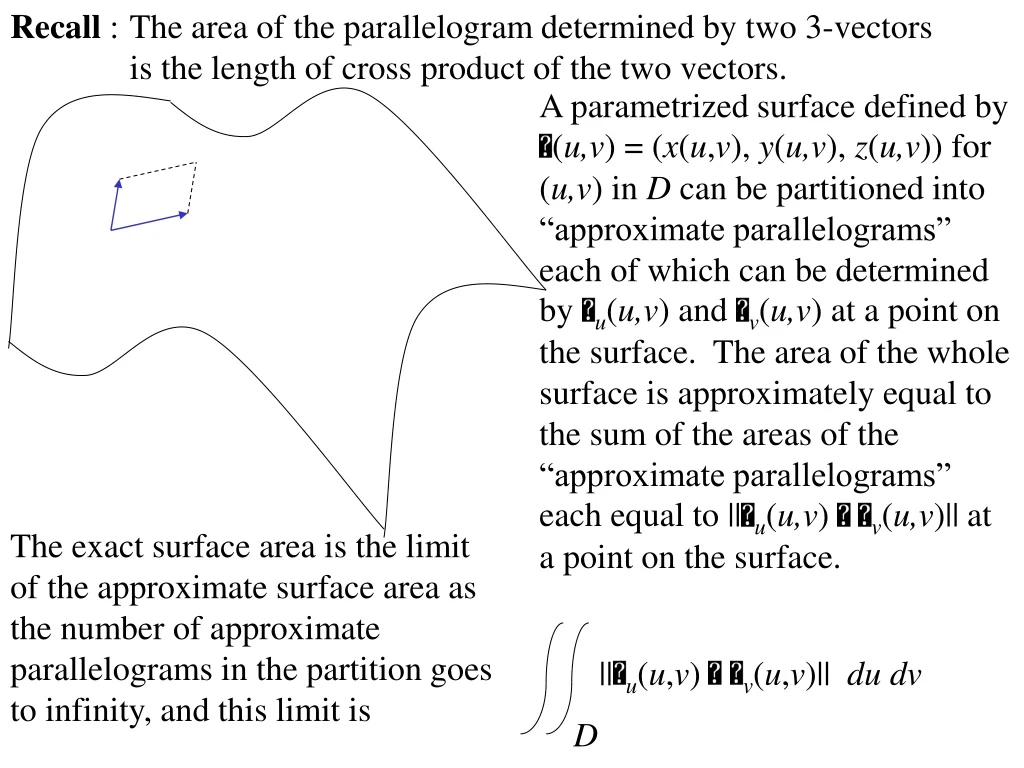
Recall : The area of the parallelogram determined by two 3-vectors is the length of cross product of the two vectors. A parametrized surface defined by (u,v) = (x(u,v), y(u,v), z(u,v)) for (u,v) in D can be partitioned into “approximate parallelograms” each of which can be determined by u(u,v) and v(u,v) at a point on the surface. The area of the whole surface is approximately equal to the sum of the areas of the “approximate parallelograms” each equal to ||u(u,v) v(u,v)|| at a point on the surface. The exact surface area is the limit of the approximate surface area as the number of approximate parallelograms in the partition goes to infinity, and this limit is ||u(u,v)v(u,v)||du dv D
Recall (from Section 4.2): b The arc length of the path c(t) from c(a) to c(b) is ||c(t)|| dt . a The definition of surface area is a generalization of arc length: The area of the parametrized surface defined by (u,v) = (x(u,v), y(u,v), z(u,v)) for (u,v) in D is ||u(u,v)v(u,v)||du dv D
Example Consider the part of the sphere x2 + y2 + z2 = 1 which lies above the xy plane and is bounded by the elliptical cylinder 3x2 + 4y2 = 3 . (a) (b) (c) Write the part of the sphere above the xy plane as a function z = f(x,y). z = f(x,y) = (1 – x2 – y2)1/2 Let D be the region inside the ellipse 3x2 + 4y2 = 3 on the xy plane. Describe D as a y-simple region. – 1 x 1 , – (3 – 3x2)1/2/2 y(3 – 3x2)1/2/2 Parametrize the part of the sphere which lies above the xy plane and is bounded by the elliptical cylinder. (u,v) = ( u , v , (1 – u2 – v2)1/2 ) for – 1 u 1 , – (3 – 3u2)1/2/2 v(3 – 3u2)1/2/2
(d) Find the surface area of the part of the sphere which lies above the xy plane and is bounded by the elliptical cylinder. u(u,v) = ( 1 , 0 , –u(1 – u2 – v2)–1/2 ) v(u,v) = ( 0 , 1 , –v(1 – u2 – v2)–1/2 ) u(u,v) v(u,v) = ( u(1 – u2 – v2)–1/2 , v(1 – u2 – v2)–1/2 , 1 ) 1 ————— (1 – u2 – v2)1/2 ||u(u,v)v(u,v)|| = 1 (3 – 3u2)1/2/2 ||u(u,v)v(u,v)||du dv = 1 ————— dv du = (1 – u2 – v2)1/2 D – 1 – (3 – 3u2)1/2/2
1 (3 – 3u2)1/2/2 1 ————— dv du = (1 – u2 – v2)1/2 – 1 – (3 – 3u2)1/2/2 1 (3 – 3u2)1/2/2 1 dv ———————— ——— du = (1 – (v/1 – u2)2)1/21 – u2 – 1 – (3 – 3u2)1/2/2 1 (3 – 3u2)1/2/2 v arcsin –––––– du = (1 – u2)1/2 Recall: d — arcsin[f(x)] = dx – 1 1 ————— f/(x) 1 – [f(x)]2 v = – (3 – 3u2)1/2/2
1 (3 – 3u2)1/2/2 v arcsin –––––– du = (1 – u2)1/2 – 1 v = – (3 – 3u2)1/2/2 1 3 arcsin –– 2 3 arcsin –––– du = 2 – 1 1 du = 3 3 4 3 – 1
Recall that the line integral of a vector field F over a path c is defined to be b and is often denoted by F(c(t)) • c(t) dt F • ds . c a In an analogous manner, the surface integral of a vector field F with parametrization (u,v) of the surface is defined to be F((u,v)) • [u(u,v)v(u,v)]du dv D and is often denoted by F • dS . Observe that (1) If F = in the definition of the line integral, then the line integral is c(t) ——— || c(t) || the length of the path.
Observe that (1) (2) If F = in the definition of the line integral, then the line integral is c(t) ——— || c(t) || the length of the path. If F = in the definition of the surface integral, then the surface integral is u(u,v)v(u,v) ————————– || u(u,v)v(u,v) || the area of the surface. Recall Green’s Theorem (Theorem 1 on page 522) which says that if F = P(x,y)i + Q(x,y)j is a vector field defined on D, then QP — – — dA = xy F • ds D D curl(F) • k
Recall Green’s Theorem (Theorem 1 on page 522) which says that if F = P(x,y)i + Q(x,y)j is a vector field defined on D, then QP — – — dA = xy F • ds D D curl(F) • k Suppose a surface S can be either defined as a function or parametrized over a region D satisfying the conditions of Green’s Theorem. Stokes’ Theorem (Theorem 5 on page 533 and Theorem 6 on page 538) says that if F is a vector field in R3 defined on the surface S and the boundary of the surface is the path S, then curl(F) • [u(u,v)v(u,v)]du dv = F • ds D S



















