Download

1 / 27
270 likes | 358 Views
Particle filter and its potential applications in smart grid. Zhiguo Shi. Outline. Introduction to Zhejiang University Fundamental concept Particle filter algorithm Application to SOC/SOH of battery charge Discussion. Outline. Introduction to Zhejiang University Fundamental concept

E N D
Particle filter and its potential applications in smart grid Zhiguo Shi
Outline • Introduction to Zhejiang University • Fundamental concept • Particle filter algorithm • Application to SOC/SOH of battery charge • Discussion
Outline • Introduction to Zhejiang University • Fundamental concept • Particle filter algorithm • Application to SOC/SOH of battery charge • Discussion
Big picture Observed signal 1 t Estimation Particle Filter sensor Observed signal 2 t t • Goal: Estimate a stochastic process given some noisy observations • Concepts: • Bayesian filtering • Monte Carlo sampling
Problem formulations • Estimate a stochastic process given some noisy observations • How? • Step 1: Build system dynamic model • State equation: xk=fx(xk-1, uk) • xk state vector at time instant k • fx state transition function • uk process noise with known distribution
Problem formulations • Estimate a stochastic process given some noisy observations • How? • Step 2: Build observation model • Observation equation: zk=fz(xk, vk) • zk observations at time instant k • fx observation function • vk observation noise with known distribution
Problem formulations • Estimate a stochastic process given some noisy observations • How? Step 3: Use particle filter Posterior x
Motivations • The trend of addressing complex problems continues • Large number of applications require evaluation of integrals • Non-linear models • Non-Gaussian noise
Applications • Other applications1) • Biology & Biochemistry • Chemistry • Economics & Business • Geosciences • Immunology • Materials Science • Pharmacology & Toxicology • Psychiatry/Psychology • Social Sciences • Signal processing • Image processing and segmentation • Model selection • Tracking and navigation • Communications • Channel estimation • Blind equalization • Positioning in wireless networks
An Example • States: position and velocity xk=[xk, Vxk, yk, Vyk]T • Observations: angle zk • Observation equation: zk=atan(yk/ xk)+vk • State equation: xk=Fxk-1+ Guk • Blue – True trajectory • Red – Estimates
Outline • Introduction to Zhejiang University • Fundamental concept • Particle filter algorithm • Application to SOC/SOH of battery charge • Discussion
Basic Idea • Representing belief by sets of samples or particles • are nonnegative weights called importance factors • Updating procedure is sequential importance sampling with re-sampling ISEE, ZJU
Step 0: initialization Each particle has the same weight Step 1: updating weights. Weights are proportional to p(z|x) Particle filter illustration
Step 3: updating weights. Weights are proportional to p(z|x) Step 4: predicting. Predict the new locations of particles. Step 2: predicting. Predict the new locations of particles. Particle filter illustration (Continued) Particles are more concentrated in the region where the person is more likely to be
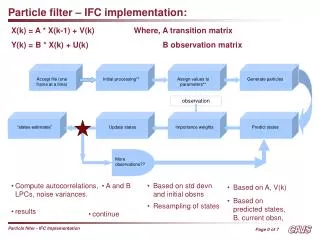
Output estimates Output More observations? Particle filtering algorithm Initialize particles New observation Particle generation 1 2 M . . . 1 2 M . . . Weigth computation Normalize weights Resampling yes no Exit
Outline • Introduction to Zhejiang University • Fundamental concept • Particle filter algorithm • Application to SOC/SOH of battery charge • Discussion
Battery management in Electrical Vehicle[1] • The cost of the power system can reach up to 1/3 of the total cost of the electric vehicle. • The consistency of batteries is essential to the life and safety of the whole vehicle system [1] Gao, M., et al., Battery State of Charge online Estimation based on Particle Filter, Proceeding of the 4th International Congress on Image and Signal Processing, pp. 2233-2236, 2011.
System model • State Transition function Proportion coefficientt related to discharge rate Nominal capacity of battery Instantaniously discharge current • Observation function
Outline • Introduction to Zhejiang University • Fundamental concept • Particle filter algorithm • Application to SOC/SOH of battery charge • Discussion
Hope: my crude remarks may draw forth by abler people • Fundamentally, the particle filter can be applied to systems described by state equation representation with state transition function and observation function.
Short Term Electricity Price Prediction for Home Appliance Control