Download
1 / 24
280 likes | 530 Views
IR-to-RF Link for the Lego RCX. Eric P. Walklet Senior Project - Computer Engineering - 2005 Advisor: Prof. John Spinelli. Presentation Agenda. Introduction to the RCX Statement of the Problem Project Considerations Block Diagram Programming the RCX The IR Circuitry

E N D
IR-to-RF Linkfor the Lego RCX Eric P. Walklet Senior Project - Computer Engineering - 2005 Advisor: Prof. John Spinelli
Presentation Agenda • Introduction to the RCX • Statement of the Problem • Project Considerations • Block Diagram • Programming the RCX • The IR Circuitry • Crossbow Motes and TinyOS • Communicating Between Unlike Devices • RFRCX – Controlling the RCX with MATLAB • Challenges and Conclusions IR-to-RF Link for the Lego RCX Slide 2
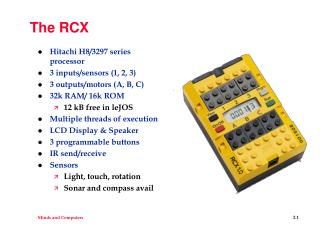
Introducing the Lego RCX • Part of the Lego Mindstorms package for many years • Three motors and three sensors • Programmed using a proprietary language created by Lego • Interfaces with a host computer through a 935-nm IR link with a USB tower IR-to-RF Link for the Lego RCX Slide 3
Purpose of the Project • To design an interface for the Lego RCX that does not require a line of sight to operate – such as an RF link • To design a new “programming language” in MATLAB that can allow novice programmers to control the RCX • Inspired by CSC-030 IR-to-RF Link for the Lego RCX Slide 4
Project Requirements • Language must control all three motors and read all three sensors, at least • Language must be simple enough to understand for a student with little programming experience • Information must travel between MATLAB and the RCX via some type of RF link • RCX is limited by a one-byte message buffer and an archaic protocol IR-to-RF Link for the Lego RCX Slide 5
Crossbow Motes • The building blocks of wireless sensor networks • Operate at RF frequency of 900 MHz • Capable of communication through RF or UART • Ethernet Gateway allows communication with other devices through TCP/IP • Programmed with nesC IR-to-RF Link for the Lego RCX Slide 6
Block Diagram MIB600CA Ethernet Gateway MATLAB User’s PC TCP/IP Mote 900 MHz RF Mote 935 nm IR IR RX/TX Circuitry Lego RCX IR-to-RF Link for the Lego RCX Slide 7
Making the Most of One Byte From MATLAB to the RCX – Motor Control Even Parity Odd Parity Motor 1 Motor 2 Motor 3 8 voltage settings, two directions; now limited to 3 settings in each direction + idle From RCX to MATLAB – Sensor Status Odd Parity Even Parity Sensor 1 Sensor 2 Sensor 3 100 scaled levels of sensitivity; now limited to 4 scaled levels of sensitivity IR-to-RF Link for the Lego RCX Slide 8
Programming the RCX with LeJOS • LeJOS is a Java VM that replaces the standard RCX firmware • Small enough to fit in the 32 kB (!) of memory • Allows RCX programmers to use a language that they are already familiar with, though there are limitations • Support for the entire RCX feature set… and beyond IR-to-RF Link for the Lego RCX Slide 9
What the RCX Accomplishes • Accepts a one-byte message from the IR receiver • Uses that message to control the three motors accordingly • Checks the status of the three sensors • Assembles the status of the three sensors into a one-byte message • Sends the message back through the IR transmitter IR-to-RF Link for the Lego RCX Slide 10
while(true) // loop indefinitely { // reads in a message from the mote, and converts // it to binary inBin = integerToBinary(dis.readInt()); // if the parity checks properly, set the motors // accordingly if (evenParityCheck(inBin) && oddParityCheck(inBin)) { setMotors(inBin); } // assembles a message from the status of the // sensors, and adds parity outBin = convertBinary(setParity(getSensors())); // sends the sensor message dos.writeInt(outBin); dos.flush(); } if(motorNumber==1) { if((chArray[0] == 1) && (chArray[1] == 1)) { return 3; // motor is floating } else if((chArray[0] == 1) && (chArray[1] == 0)) { return 2; // motor is on, forward } else if((chArray[0] == 0) && (chArray[1] == 1)) { return 1; // motor is on, reverse } else return 0; // motor is off } else if(motorNumber==2) { if((chArray[2] == 1) && (chArray[3] == 1)) { return 3; // motor is floating } else if((chArray[2] == 1) && (chArray[3] == 0)) { return 2; // motor is on, forward } else if((chArray[2] == 0) && (chArray[3] == 1)) { return 1; // motor is on, reverse } else return 0; // motor is off } else if(motorNumber==3) { if((chArray[4] == 1) && (chArray[5] == 1)) { return 3; // motor is floating } I Can’t Believe It’s Not Java! IR-to-RF Link for the Lego RCX Slide 11
Do You Speak Infrared? • Need an IR receiver and transmitter to communicate directly with the RCX • A Sharp GP1UW70QS remote control receiver collects sensor information from the RCX • A PIC12C508A microcontroller modulates the motor messages at 38 kHz so they can be detected by the RCX, and outputs them through an IR photodiode IR-to-RF Link for the Lego RCX Slide 12
Circuit Diagram What the IR Detector Sees What the IR Diode Sends IR-to-RF Link for the Lego RCX Slide 13
Mote #2 – The Great Interpreter • The RCX uses a unique protocol – eight bytes sent for a one-byte message • Crossbow motes use a variation of HDLC for both radio transmission and UART communication • The mote that connects to the IR circuit must change the message to a structure the RCX can understand • Sends translated message to RCX via UART, and sends decoded message to gateway via RF IR-to-RF Link for the Lego RCX Slide 14
TinyOS and nesC • TinyOS is a native environment for small devices like the motes • nesC is a modular language based on C • Programs are formed by “wiring” interfaces and components to each other • VERY DIFFICULT AT FIRST • Each program requires a configuration and a module to operate IR-to-RF Link for the Lego RCX Slide 15
configuration UARTRCXPacket { provides { interface StdControl as Control; interface BareSendMsg as Send; interface ReceiveMsg as Receive; } } implementation { components RCXPacket as Packet, UART; Control = Packet.Control; Send = Packet.Send; Receive = Packet.Receive; Packet.ByteControl -> UART; Packet.ByteComm -> UART; } /* Command to transfer an RCX-compatible packet */ command result_t sendRCXPacket(TOS_MsgPtr msg) { uint8_t* rcx_packet; result_t rval; // form RCX-compatible frame rcx_packet[0] = (uint8_t)(PACKET_HEADER); rcx_packet[1] = (uint8_t)(0xFF PACKET_HEADER); rcx_packet[2] = (uint8_t)(OPCODE_MESSAGE); rcx_packet[3] = (uint8_t)(0xFF - OPCODE_MESSAGE); rcx_packet[4] = (uint8_t)(msg); rcx_packet[5] = (uint8_t)(0xFF - rcx_packet[4]); rcx_packet[6] = (uint8_t)(OPCODE_RETTOSUB); rcx_packet[7] = (uint8_t)(0xFF - OPCODE_RETTOSUB); rval = call SendVarLenPacket.send(rcx_packet, PACKET_SIZE); return rval; } A Look at the Configuration To send one byte to the RCX… [0xFF] [~0xFF] [0xF7] [~0xF7] [message] [~message] [0x08] [~0x08] IR-to-RF Link for the Lego RCX Slide 16
Mote #1: Not Quite as Glorious • Messages received from the RF network (i.e. Mote #2) are passed on to the Ethernet gateway, and further to the PC • Messages received from the Ethernet gateway are sent to the wireless network to be • Programming is the same as Mote #2, though lacks the RCX encoding IR-to-RF Link for the Lego RCX Slide 17
MATLAB and the Motes • Crossbow includes Java tools for sending and receiving messages to and from the wireless network • Message Interface Generator (MIG) creates a message class unique to the programs installed on the motes • Connection is made to the Ethernet gateway through a TCP/IP socket IR-to-RF Link for the Lego RCX Slide 18
RFRCX • Status of sensors and motors are stored to two global variables • A variety of functions are assembled into a program to describe the RCX’s behavior • Each function updates the global variables depending on user input or received messages • Always something to send! Always something to receive! IR-to-RF Link for the Lego RCX Slide 19
function setMotorBackward(number) if number = 1 motorSettings(1) = 0; motorSettings(2) = 1; elseif number = 2 motorSettings(3) = 0; motorSettings(4) = 1; elseif number = 3 motorSettings(5) = 0; motorSettings(6) = 1; end setMotorParity; asInt = buildMessage; oMsg = net.tinyos.rfrcx.RCXMotorMsg(asInt); send(2,oMsg); % drive forward % when a wall is hit % back up, and move forward % again motorSettings = resetMotors; sensorSettings = resetSensors; setMotorForward(1); while getSensorValue(1) = 0 setMotorOff(2); end setAllMotors(-1,-1,0); continue(100); setMotorForward(2); continue(100); setMotorForward(1); RFRCX in Action IR-to-RF Link for the Lego RCX Slide 20
Problems and Challenges • UART on the motes is prone to errors and failures • Poor battery life on the motes without power-saving features • nesC is not well documented • RCX hardware is proprietary • RFRCX is not as user friendly as it could be • Price IR-to-RF Link for the Lego RCX Slide 21
The Future • Use multiple messages to have more control over the motors and other features • Control multiple motes through the same gateway to address price issue • Replace MATLAB with a true Java interface • Packaging • A direct-connect solution IR-to-RF Link for the Lego RCX Slide 22
Acknowledgments • http://www.xbow.com • http://www.tinyos.net • Kekoa Proudfoot http://graphics.stanford.edu/~kekoa/rcx/ • http://www.csdm.qc.ca/SJdelaLande/lesclasses/4web/wwwrobotique/robotique_lego.htm • Prof. Spinelli • Crossbow (for their informative training seminar) • The rest of the CN/CS/EE department And a silent wave to all those in the room who were inspired to become engineers by the Legos they played with as a kid… including me. IR-to-RF Link for the Lego RCX Slide 23