Download
1 / 53
590 likes | 889 Views
B. F. G. A. C. D. E. Graphs. Graph G(V,E): finite set V of nodes (vertices) plus a finite set E of arcs (or edges) between nodes V = {A, B, C, D, E, F, G} E = {AA, AB, AD, CD, DE, BF, EF, FG, EG }. Terminology. Two vertices are adjacent if they are connected with an edge

E N D
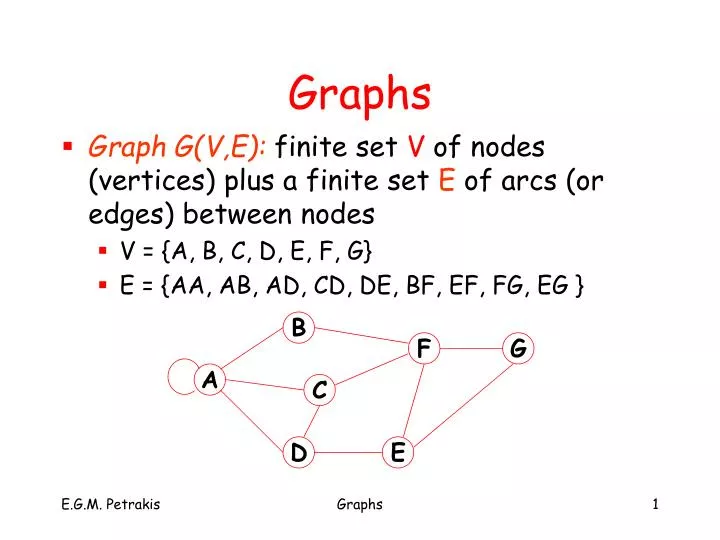
B F G A C D E Graphs • Graph G(V,E): finite set V of nodes (vertices) plus a finite set E of arcs (or edges) between nodes • V = {A, B, C, D, E, F, G} • E = {AA, AB, AD, CD, DE, BF, EF, FG, EG } Graphs
Terminology • Two vertices are adjacent if they are connected with an edge • Adjacent or neighbor vertices • Subgraph of G=(V,E): a graph G’=(V’,E’) where V’, E’ are subsets of V, E • |V|,|E|: number of nodes, edges of G • Complete graph: contains all possible edges • |E| in Θ(|V|2) Graphs
B C A G E D H F Undirected Graphs • The edges are not directed from one vertex to another Graphs
B C A G E D H F Directed Graphs • The edges are directed from one vertex to another Graphs
A A B C B C D D E F G Graphs
More Definitions • Vertex degree: maximum number of incoming or outgoing edges • in-degree: number of incoming edges • out-degree: number outgoing edges • RelationRonA: R = {<x, y>| x, y ∊ N} • x < y • x mod y = odd • Labeled graph: labels on vertices or edges • Weighted graph: weights on edges Graphs
1 relation weighted 3 10 3 10 7 3 1 5 8 5 8 17 17 1 5 6 6 Graphs
Paths • There exist edges connecting two nodes • Length of path: number of edges • Weighted graphs: sum of weights on path • Cycle: path (of length 3 or more) connecting a vertex with itself • Cyclic graph: contains cycle • Acyclic graph: does not contain cycle • DAG:Directed Acyclic Graph Graphs
7 2 6 0 4 3 5 1 Connected Graphs • An undirected graph is connected if there is a path between any two vertices • Connected components: maximally connected subgraphs Graphs
a b a b a b a b a b a b a b c Operations on Graphs • join (a,b) • join (a,b,x) • remv[wt] (a,b,x) • adjacent (a,b) x adjacent (a,b) = true adjacent (a,c) = false Graphs
Build a Graph read(n); // number of nodes read and create n nodes label them from 1 .. n while not eof(..) { read(node1, node2, w12); joinwt(node1, node2, w12); } any graph algorithm Graphs
directed graph 0 1 2 3 4 0 2 0 1 1 1 1 4 2 1 1 3 3 1 4 1 adjacency matrix 0 1 4 1 3 2 4 3 adjacency list 2 4 1 Representation of Directed Graphs Graphs
undirected graph 0 1 2 3 4 0 1 1 0 2 1 1 1 1 2 1 1 4 3 1 1 1 4 1 1 1 3 0 1 4 1 0 3 4 2 3 4 3 1 2 adjacency list 4 0 1 2 Representation of Undirected Graphs adjacency matrix Graphs
Matrix Implementation • Simple but difficult to process edges, unused space in matrix • mark: 1D array marking vertices • mark[i] = 1 if vertex i has been visited • typedef int *Edge; • matrix: the actual Graph implemented as an 1D array of size n2 • edge (i, j) is found at matrix[i*n + j] • if edge exists matrix[i*n + j] = wt • otherwise matrix[i*n + j] = NOEDGE Graphs
Graph class: Adjacency Matrix template <class Edge> class Graph { private: Edge* matrix; // the edge matrix int numVertex, numEdge; // number of vertices, edges bool* Mark; // the mark array public: Graph( ); ~Graph( ); // constructor, destructor int n( ), e ( ) // number of vertices, edges Edge first(int); // get the first edge for a vertex bool isEdge(Edge); // TRUE if this is an edge Edge next(Edge); // get next edge for a vertex int v1(Edge), v2(Edge) // vertex edge comes from, goes to int weight(int, int); // return weight of edge int weight(Edge); // return weight of edge }; Graphs
Constructor, Destructor template <class Edge> Graph<Edge>::Graph( ) { mark = NULL; matrix = NULL; } template <class Edge> Graph<Edge>::~Graph( ) { if (mark != NULL) delete [ ] mark; if (matrix != NULL) delete [ ] matrix; } Graphs
Member Functions template <class Edge> int Graph<Edge>::n( ) { return numVertex; } template <class Edge> int Graph<Edge>::e( ) { return numEdge; } Graphs
Member Functions (cont.) template <class Edge> Edge Graph<Edge>::first(int v) { //first edge of node int stop = (v+1) *numVertex; // pos. at end of v’s row for ( int pos = v * numVertex; pos < stop; pos++) //scans entire row if ( matrix[pos] != NOEDGE) return &matrix[pos]; return NULL; } Graphs
Member Functions (cont.) template <class Edge> bool Graph<Edge>::isEdge(Edge w) { return w != NULL; } template <class Edge> Edge Graph<Edge>::next(Edge w) { // next edge of (w,0) int stop = (v1(w) + 1) * numVertex; // pos at end of row for (int pos = (w – matrix) + 1; pos < stop; pos++) if (matrix[pos] != NOEDGE) return &matrix[pos]; return NULL; } Graphs
Member Functions (cont.) template <class Edge> int Graph<Edge>::v1(Edge w) // 1st vertex of edge { return ( w – matrix ) / numVertex; } template <class Edge> int Graph<Edge>::v2(Edge w) // 2nd vertex edge { return ( w – matrix ) % numVertex; } Graphs
Member Functions (cont.) template <class Edge> int Graph<Edge>::weight( int i, int j) { // return weight of edge if ( matrix[ i * numVertex + j ] == NOEDGE ) return INFINITY; else return matrix[ i * numVertex + j ]; } template <class Edge> int Graph<Edge>::weight(Edge w) { // return weight of edge if ( *w == NOEDGE ) return INFINITY; else return *w; } Graphs
Graph Class: Adjacency List template <class Edge> class Graph { private: Edge *list; // the vertex list int numVertex; // number of vertices int numEdge; // number of edges bool *Mark; // the mark array public: Graph( ); ~Graph( ); // constructor, destructor int n( ), e( ); // number of vertices, edges Edge first(int); // get the first edge of vertex bool isEdge(Edge); // TRUE if this is an edge Edge next(Edge); // get next edge for a vertex int v1(Edge), v2(Edge); // return vertex edge comes from, goes to int v2(Edge); // return vertex edge goes to int weight(int, int), // return weight of edge int weight(weight); // return weight of edge }; Graphs
A Singly-Linked List Node • class EdgeLink { public: int weight; // edge weight int v1; // 1st vertex of edge int v2; // 2nd vertex of edge EdgeLink *next; // pointer to next edge in list EdgeLink(int vt1, int vt2, int w, EdgeLink *nxt = NULL) // constructor { v1 = vt; v2 = vt2; weight = w; next = nxt; } }; • Graph<EdgeLink> g; Graphs
Member Functions template <class Edge> Graph<Edge>::Graph( ) { // constructor Mark = NULL; list = NULL; } template <class Edge> Graph<Edge>::~Graph( ) { // destructor: return allocated space if (Mark != NULL) delete [ ] Mark; if (list != NULL) { // remove all of the edges for (int v = 0; v < n( ); v++) // for each vertex return all edges while (list[v] != NULL) { list[v]= list[v]next; delete temp; } delete [ ] list; // remove the vertex list headers } } Graphs
Member Functions (cont.) template <class Edge> int Graph<Edge>::n( ) { return numVertex; } // number of vertices template <class Edge> int Graph<Edge>::e( ) { return numEdge; } // number of edges template <class Edge> Edge Graph<Edge>::first(int v) // get the first edge {return list[v]; } template <class Edge> bool Graph<Edge>::isEdge(Edge w) // TRUE if it is an edge { return w != NULL; } Graphs
Member Functions (cont.) template <class Edge> Edge Graph<Edge>::next(Edge w) { // get next edge for a vertex if (w == NULL) return NULL; else return wnext; } template <class Edge> int Graph<Edge>::v1(Edge w) // return vertex edge comes from { return wv1; } template <class Edge> int Graph<Edge>::v2(Edge w) // return vertex edge goes to { return wv2; } Graphs
Member Functions (cont.) template <class Edge> int Graph<Edge>::weight( int i, int j) { // return weight of edge for (Edge curr = list[i]; curr != NULL; curr = curr->next) if (currv2 == j ) return curr-> weight; return INFINITY; } template <class Edge> int Graph<Edge>::weight(Edge w) { // return weight of edge if ( w == NULL ) return INFINITY; else return w -> weight; } Graphs
ndptr nextarc arcptr info nextnode info: data arcptr: pointer to an adjacent node nextnode: pointer to a graph node ndptr: pointer to adjacent node nextarc: pointer to next edge B A D C E A Better Implementation Graphs
graph C D n i l E n i l n i l n i l Β A <D,B> n i l <C,E> n i l <A,B> <A,C> <A,D> <A,E> Graphs
Graph Traversal • Trees • preorder • inorder • postorder • Graphs • Depth First Search (DFS) • Breadth First Search (BFS) Graphs
Depth First Search (DFS) • Starting from vertex v, initially all vertices are “unvisited” • void DFS(v) { Mark(v) = true; for each vertex w adjacent to v if (!Mark(w)) DFS(w) } Graphs
Complexity of DFS • O(|V| + |E|): adjacency list representation • O(|V|2) in dense graphs • O(|V|2):matrix representation Graphs
v = v1 7 v3 v2 v1 v6 v5 v4 v8 v7 1 1 7 5 6 8 2 2 5 3 3 4 2 4 6 8 8 8 3 DFS : V1V2V4V8V5V6V3V7 v1 v2 v3 v7 v4 v5 v6 v8 Graphs
v = v1 ΒFS : V1V2V3V4V5V6V7V8 v1 v2 v3 v7 v4 v5 v6 v8 Breadth-First Search (BFS) Graphs
BFS (cont.) • Starting from vertex v, all nodes “unvisited”, visit adjacent nodes (use a queue) void DFS(v) { visited(v) = true; enqueue(v, Q); while ( Q ≠ 0 ) { x = dequeue(Q); for each y adjacent x do if ! Mark(y) { Mark(y) = TRUE; enqueue(y,Q); } } } Graphs
front rear output(v1) v2 v3 v1 v5 v4 v8 v4 v7 v8 v7 v5 v6 v5 v8 v6 v7 v6 v6 v3 v1 front v2 v3 output(v2) rear v7 v4 v5 v6 output(v3) front front v8 front output(v4) rear rear rear front output(v5) output(v6) front output(v7) v = v1 Graphs
Complexity of BFS • O(|V|+|E|) : adjacency list representation • d1 + d2 + ...+ dn = |E| • di= degree (vi) • O(|V|2) : adjacency matrix representation Graphs
DFS Algorithm template <class Edge> void DFS (Graph<Edge>& G, int v){ action(G,v); G.Mark[v] = VISITED; for ( Edge w = G.first(v); G.isEdge(w); w = G.next(w)) if (G.Mark[G.v2(w)] = = UNVISITED)DFS ( G, G.v2(w)); action(G,v); } Graphs
BFS Algorithm template <class Edge> void BFS (Graph<Edge>& G, int start){ Queue Q(G.n( )); Q.enqueue(start); G.Mark[start] = VISITED; While ( !Q.isempty( )) { int v = Q.dequeue( ); action(G,v); for ( Edge w = G.first(v); G.isEdge(w); w = G.next(w)) if (G.Mark[G.v2(w)] = = UNVISITED){ G.Mark[G.v2(w)] = VISITED;Q.enqueue(G.v2(w)); } action(G,v); } Graphs
B C A D E F A E B G C D connected components Connected - Unconnected connected graph: undirected graph, there is a path connecting any two nodes unconnected graph: not always a path Graphs
Connected Components • If there exist unconnected nodes in a DFS or BFS traversal of G then G is unconnected • Find all connected components: void COMP(G, n) { for i = 1 to n if Mark(i) == UNVISITED then DFS(i) [or BFS(i)]; } • Complexity: O(|V| + |E|) Graphs
(G,E) Spanning Trees Tree formed from edges and nodes of G Spanning Tree Graphs
Spanning Forest • Set of disjoint spanning trees Tiof G=(V,E) • Ti = ( Vi , Ei ) 1≤ i ≤ k, Vi,Ei:subsets of V, E • DFS producesdepth first spanning trees or forest • BFS breadth first spanning trees or forest • Undirected graphs provide more traversals • produce less but short spanning trees • Directed graphs provide less traversals • produce more and higher spanning trees Graphs
DFS spanning tree A A B B C C D E A DFS A D E B F DFS spanning forest DFS B C C E F D D E G G DFS Graphs
A ΒFS A B F B C E C F D D E H H BFS A A BFS spanning tree ΒFS B C D B C D E F G E F G BFS spanning forest Graphs
1 Prim’s algorithm: Complexity O(|V|2) 6 5 1 5 5 2 3 4 6 4 2 3 5 6 6 1 1 1 1 1 1 1 1 1 1 5 5 3 3 3 4 2 3 4 2 3 4 4 4 2 4 2 4 2 3 6 6 6 5 6 costT = 1 + 5 + 2 + 4 + 3 Min. Cost Spanning Tree Graphs
Prim’s Algorithm template <class Edge> void Prim(Graph<Edge>& G, int s) { / /prim’s MST algorithm int D[G.n( )]; // distance vertex int V[G.n( )]; // who’s closest for (int i=0; i<G.n( ); i++); D[i] = INFINITY; // initialize D[s] = 0; for ( i=0; i<G.n( ); i++) { // process the vertices int v = minVertex(G, D); G.Mark[v] = VISITED; if ( v != s ) AddEdgetoMST(V[v], v); // add this edge to MST if (D[v] = = INFINITY ) return; // unreachable vertices for ( Edge w = G.first(v); G.isEdge(w); w = G.next(w)) if (D[G.v2(w)] > G.weight(w)) { D[G.v2(w)] = G.weight(w); // update distance and V[G.v2(w)] = v; // who it came from } } } Graphs
Prim’s Algorithm (cont.) template <class Edge> ){ // find min cost vertex void minVertex(Graph<Edge>& G, int* D int v; for (int i = 0; i < G.n( ); i++) // initialize if (G.Mark[i] = = UNVISITED) { v = i; break; } for ( i=0; i<G.n( ); i++) // find smallest value if ((G.Mark[i] = = UNVISITED) && ( D[i] < D[v] )) v = i; return v; } Graphs
Dijkstra’s Algorithm • Find the shortest path from a given node to every other node in a graph G • no better algorithm for single ending node • Notation: • G = (V,E) : input graph • C[i,j] : distance between nodes i, j • V : starting node • S : set of nodes for which the shortest path from v has been computed • D(W) : length of shortest path from v to w passing through nodes in S Graphs
starting point: v = 1 1 10 100 30 2 5 10 60 50 4 3 20 Graphs