Download
1 / 10
100 likes | 240 Views
Nelineární systémy. Funkcí f ( x ( t ), u ( t )) je v ka ždém okamžiku pohybu systému definován vektor rychlosti změny stavu d x ( t )/ dt určující okamžitý směr stavové trajektorie ve stavovém prostoru R n.

E N D
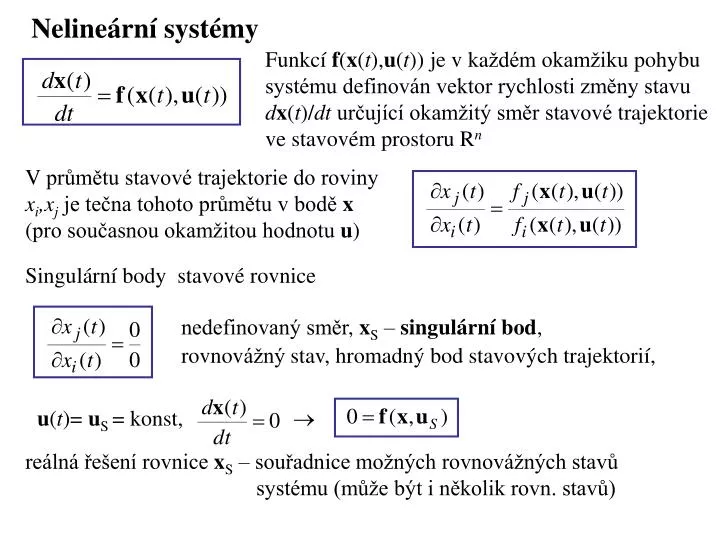
Nelineární systémy Funkcí f(x(t),u(t)) je v každém okamžikupohybu systému definován vektor rychlosti změny stavudx(t)/dt určující okamžitý směr stavové trajektorie ve stavovém prostoru Rn V průmětu stavové trajektorie do rovinyxi,xjje tečna tohoto průmětu v boděx (pro současnou okamžitou hodnotuu) Singulární body stavové rovnice nedefinovaný směr, xS – singulární bod, rovnovážný stav, hromadný bod stavových trajektorií, u(t)= uS = konst, reálná řešení rovnicexS – souřadnice možných rovnovážných stavů systému (může být i několik rovn. stavů)
Stabilita nelineárního systému Nelineární systém - možná existence více sing. bodů pro uS - sing. bod může měnit svou povahu v závislosti na velikosti působícího vstupuuS. Stabilita podle Ljapunova Za systém stabilní podle Ljapunova považujeme takový, který po počátečním konečném vychýlení z rovnovážného stavuxSsplňujícím nerovnost se dále pohybuje tak, že pro libovolnét 0 odchylky jeho stavu od xSsplňují podmínku Asymptotická stabilita Přísnější podmínka stability singulárního bodu, vyžadující zaujetí rovnovážného stavu v tomto bodě Posouzení asymptotické stability linearazací v pracovním bodě
Linearizace dynamického systému Pro malé výchylky vstupů a stavů lze pravou stranu rovnice systému nahradit jejím úplným diferenciálem: výchozím bodem “0” je nejčastěji rovnovážný stav x0=xS a u0=uS Jakobiho matice: Metrika stavového prostoru – vzdálenost x(t)od x0 def. pomocí normy stavového prostoru. Při použití Euklidovské normy, je vzdálenost stavu E a F:
Singulární body stavové rovnice Stabilní uzel Stabilní ohnisko Nestabilní uzel Nestabilní ohnisko
PříkladSingulární bod systému třetího řádu rovnovážný stav: uS=10 póly systému l1=-0.1221, l2,3=-0.33891.5272j jediná polopřímková trajektorie ve směru vlastního vektoru
PříkladSystémn=3 Mezi stavovými veličinami neexistuje žádná další (statická, algebraická) závislost, přesto
Příklad linearizace systému Van der Pole, rizika linearizace u(t) = us= konst. A=0.5