Download
1 / 16
160 likes | 345 Views
Using Infrared and Touch Sensors on the OCTARM VI Robot. Robert Clarke Senior of Electrical Engineering and Physics Clemson University. Introduction. The OCTARM VI project, sponsored by DARPA, falls under the branch of robotics called Biodynotics. The OCTARM VI Robot is a continuum robot.

E N D
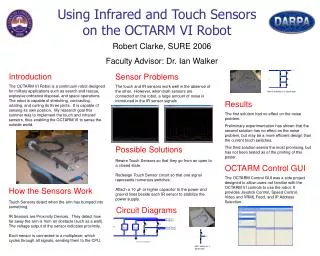
Using Infrared and Touch Sensors on the OCTARM VI Robot Robert Clarke Senior of Electrical Engineering and Physics Clemson University
Introduction • The OCTARM VI project, sponsored by DARPA, falls under the branch of robotics called Biodynotics. • The OCTARM VI Robot is a continuum robot. • Numerous abilities and applications
Abilities of the OCTARM VI • The arm can • Rotate • Extend/Retract • Curl • The arm is like an elephant trunk.
Applications • The OCTARM VI is being designed mainly for military use. • Some possible applications are • Search and Rescue • Explosive Ordnance/IED Removal • Space
How the Sensors Work • Touch Sensors detect when the arm has bumped into something. • IR Sensors are Proximity Devices. They detect how far away the arm is from an obstacle (such as a wall). The voltage output of the sensor indicates proximity. • Each sensor is connected to a multiplexer, which cycles through all signals, sending them to the CPU.
Sensor Problems • Touch Sensors and IR Sensors work by themselves. • Large amount of noise is introduced in the IR Sensor output when the two types are combined.
Possible Solutions • Rewire Touch Sensors so that they go from an open to a closed state. • Redesign Touch Sensor circuit so that one signal represents numerous switches.
Solution #1 • Rewiring the touch sensors so that they went from an open to a closed state had no effect on the noise in the sensors.
Solution #2 • Current Circuit Diagram:
Solution #2 • Redesigned Touch Sensors: Old 1 switch to 1 signal style New 3 switches to 1 signal style
Problems with Solution #2 • Theoretically, we have been unable to find a resistor combination for R1, R2, R3, and R4 that results in a voltage threshold detectable over noise. • Experimentally, we have been unable to test this new switch design due to failure of the arm’s mux board.
Where are We Going? • First thing: Resolve the compatibility issue between the IR and Touch Sensors • Next: Write software and run experiments with both sensors. • Finally: Publish Results