Download
1 / 33
330 likes | 419 Views
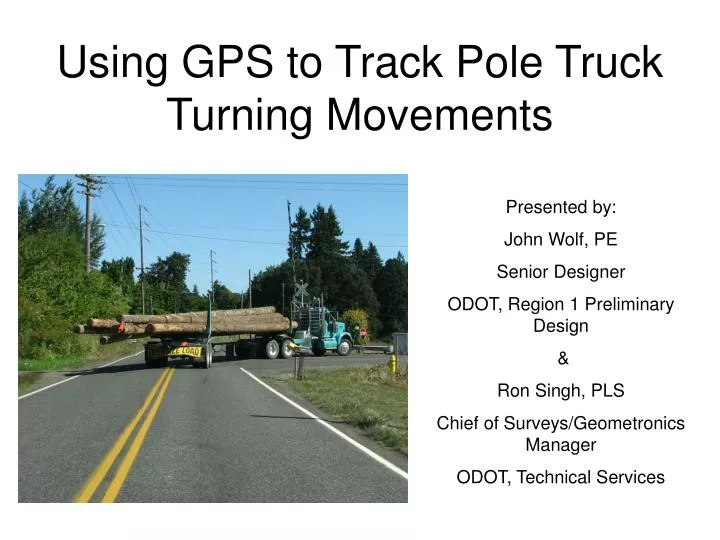
Using GPS to Track Pole Truck Turning Movements. Presented by: John Wolf, PE Senior Designer ODOT, Region 1 Preliminary Design & Ron Singh, PLS Chief of Surveys/Geometronics Manager ODOT, Technical Services. The Problem. Intersection at Bennett Road & US 30

E N D
Using GPS to Track Pole Truck Turning Movements Presented by: John Wolf, PE Senior Designer ODOT, Region 1 Preliminary Design & Ron Singh, PLS Chief of Surveys/Geometronics Manager ODOT, Technical Services
The Problem • Intersection at Bennett Road & US 30 • High volume, multilane highway • 3 Crashes in 2008 involving passenger cars and log trucks • 2 injuries and 1 fatality resulted • Permitting issue regarding overhang on long loads • Maximum Overhang was dependant on wheelbase and trailer type • Overhang was measured from rear axle • Pole trucks need access to pole yard
Bennett Road Conflict Point
The Challenges • Timing was critical • Motor Carrier issued a pilot car requirement on log trucks with large overhang, effective 9/12/08, for over 260 permit holders • Variable vehicle configurations (What should be analyzed?) • Pivoting trailer bunks influence log sweep path • Turning movement software limitations? • The need to applying the turning movements to multiple situations • Multiple intersection configurations • Freeway ramp terminals • Multilane Roads
Unique Elements of A Pole Truck Long Wheelbase Large Overhang Rear Bunk/Pivot Point Front Bunk/Pivot Point Adjustable Stinger Hitch and Compensator
Extendable Stinger 12’6” Total Length 5’6” Available Adjustment Compensator Vehicle #2
12’ 13’
AutoTURN v5.1 • AutoTURN is a CAD-based program that simulates low speed turning maneuvers for highway vehicles • Vehicle inputs • Default vehicle configurations • User defined vehicle configurations • Inputs include number of axles, axle spacing, tractor/trailer length, and distance to pintle hitch • Limitations • AutoTURN v5.1 does not account for adjustable length “stinger” pintle hitch • Turning accuracy for this type of tractor/trailer uncertain
AutoTURN Inputs Default truck templates Modified pole truck templates
Course of Action • Collected data from ODOT Motor Carrier on common pole truck configurations • Research other turning simulator software • ODOT Maintenance staff coordinated field testing of two pole trucks using GPS tracking data Note:ODOT Motor Carrier Division also collected data on accident history of pole trucks on Oregon highways and neighboring states log truck permitting requirements
GPS Devices 12’ Between Cones 5’ 5’ 5’ 5’ 5’ Ribbons Spaced at 5’ Intervals From Rear Bunk Test Vehicle #2 12’ Between Cones Cones Offset 2’ from Path for Driver’s Side Front Tire
After Data Collection • Create vehicle configurations to replicate field test • Run AutoTURN analysis • Compare results • Run sensitivity analysis of sweep path based on overhang length • Report Results to Motor Carrier and the Trucking Industry
General Findings of Field Test and Analysis • Sweep path is dependent on vehicle configuration and length of overhang from the rear bunk • Sweep path is the same for both left and right turns • AutoTURN v 5.1 reasonably predicts pole truck turning movements for various conditions • Path generated using AutoTURN v 5.1 predicted log sweep within 2’ for Vehicle #1 and 1’ for Vehicle #2 compared to GPS • AutoTURN's maximum error in the trailer off tracking was between ½’ and 2’ (2’ occurred as the vehicle exits the curve) • Multiple curves compound the error in the AutoTURN software
Outcomes • ODOT Motor Carrier changed permitting requirements for overhang, effective 11/24/2008 • Length of overhang was limited to 1/3 Wheelbase with a 25’ maximum for multilane roads • Changed the point which overhang is measured from • Lifted the temporary pilot car restriction for vehicles meeting these requirements • Requirements are posted at: http://egov.oregon.gov/ODOT/MCT/ • Currently investigating an intersection improvement project at US 30 and Bennett Road to better accommodate pole trucks