Download
1 / 25
260 likes | 454 Views
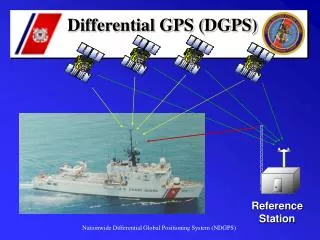
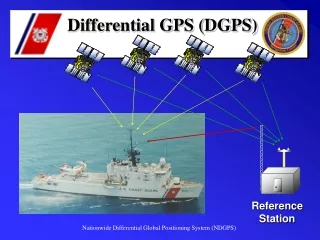
AN APPROACH TO DEVELOP MENT OF VIRTUAL DGPS NETWORK S. Miroslav J. Tsvetkov, Kosta I. Ivanov Naval Academy , Varna, Bulgaria. UNCLASSIFIED. DGPS Coverage over Mediterranean and Black Sea Region - February 2008. Red color – Active DGPS Radiobeacons;

E N D
AN APPROACH TODEVELOPMENTOF VIRTUAL DGPS NETWORKS Miroslav J. Tsvetkov, Kosta I. Ivanov Naval Academy, Varna, Bulgaria UNCLASSIFIED
DGPS Coverage over Mediterranean and Black Sea Region - February 2008 Red color – Active DGPS Radiobeacons; Green color – Not Active DGPS Radiobeacons (proposed, planed or tested); UNCLASSIFIED
DGPS Coverage over Mediterranean and Black Sea Region - February 2008 Only 7 DGPS Radiobeacons are Active over 2.5 millions km2 UNCLASSIFIED
The accuracy of GNSS Navstar • 36 meters horizontal accuracy at the 95% confidential level (2drms) • 77 meters vertical accuracy at the 95% confidential level (2drms) GLONASS • similar and sometimes better UNCLASSIFIED
Maritime User Needs • International Maritime Organization (IMO) Resolution A.915(22) • US Department of Defense and US Department of Transportation “2001 Federal Radionavigation Systems” (FRS) UNCLASSIFIED
Table 1 - Maritime User Needs UNCLASSIFIED
Augmentation Systems • wide area (WAAS, EGNOS, MSAS) • regional (SkyFix, StarFix, Eurofix, GRAS) • local (maritime, aeronautical, geodetical) The best accuracy is achieved when using data from a local reference station situated near the user. UNCLASSIFIED
Virtual Reference Station (VRS) UNCLASSIFIED
Pseudorange Error Budget • User Range Error (URE) URE = ΔION + ΔTRO + ΔSV(1) • User Equipment Error(UEE) UEE = ΔMP + ΔR(2) • User Effective Range Error (UERE) (3) • Estimated Position Error (EPE) (4) UNCLASSIFIED
OUR APPROACH Reduce the User Range Error(URE) • Calculate ΔION (5) • Calculate ΔTRO (6) • Calculate ΔSV (7) UNCLASSIFIED
Virtual Reference System ModelStructural Diagram UNCLASSIFIED
EXPERIMENT • Date – 12.02.2008 • Duration – 24 hours • Meteorological Data from Met.St. Varna, Bulgaria (WMO number 15552) • PC with MatLab and Internet Connection • Transmitter • DGPS Receiver • GPS Receiver • Laptop UNCLASSIFIED
RESULTS • 86400 position reports from GPS Receiver have been recorded (24 hours every second). • Best accuracy has been achieved with using Hopfield’s troposphere model and Black’s mapping function. Diagrams of the horizontal accuracy alternation during experiment are shown on the next three slides. On the abscissa is plotted time (UTC) and on the ordinate is plotted the value of Circular Error Probable (CEP) in meters. UNCLASSIFIED
Accuracy Alternationfor 30 minutes time interval Green color – Actual values of CEP Red curve – Average values of CEP CEP is alternating between 1,22 m and 1,55m in other words the average HORIZONTAL ACCURACY at 95% confidence level (2drms) is alternated between 2,93 m and 3,73 m UNCLASSIFIED
Accuracy Alternationfor 2 hours time Interval Green color – Actual values of CEP Red curve – Average values of CEP The average HORIZONTAL ACCURACY at 95% confidence level (2drms) for this period alternated between 3,84 m and 4,66 m. UNCLASSIFIED
Accuracy Alternationfor 30 minutes time interval Green color – Actual values of CEP Red curve – Average values of CEP The average HORIZONTAL ACCURACY at 95% confidence level (2drms) for this period alternated between 2,98 m and 4,06 m. UNCLASSIFIED
CONCLUSION For period of 24 hours the worst horizontal accuracy at 95% confidence level is 4,66 meters UNCLASSIFIED
THE MAJOR ADVANTAGES ARE • provide to maritime GPS users twice better accuracy than the one required by IMO and US; • cost effective; • independent of real reference stations; • no need to be stationary, can be mounted on ship’s bridge; • can establish and supply several Virtual Reference Stations simultaneously; UNCLASSIFIED
EXAMPLES OF USAGE • The first example presents the potential of the proposed model to establish a network or networks of virtual reference systems to provide high accuracy over a fixed sea area • The second example presents the mobility of the virtual reference system UNCLASSIFIED