Download
1 / 30
310 likes | 324 Views
Explore how to design optimal transmit and receive filters for best system performance in transmission systems. Learn about channel frequency response, pulse shaping criteria, noise power, and maximizing performance. Understand the impact of transmit and receive filters on signal power and noise levels.

E N D
3F4 Optimal Transmit and Receive Filtering Dr. I. J. Wassell.
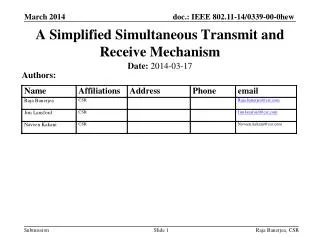
Transmission System • The FT of the received pulse is, Transmit Filter, HT(w) Channel HC(w) Receive Filter, HR(w) y(t) + Weighted impulse train To slicer N(w), Noise
Transmission System • Where, • HC(w) is the channel frequency response, which is often fixed, but is beyond our control • HT(w) and HR(w), the transmit and receive filters can be designed to give best system performance • How should we choose HT(w) and to HR(w) give optimal performance?
Optimal Filters • Suppose a received pulse shape pR(t) which satisfies Nyquist’s pulse shaping criterion has been selected, eg, RC spectrum • The FT of pR(t) is PR(w), so the received pulse spectrum is, H(w)=kPR(w), where k is an arbitrary positive gain factor. So, we have the constraint,
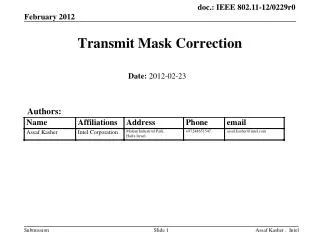
Optimal Filters • For binary equiprobable symbols, • Where, • Vo and V1 are the received values of ‘0’ and ‘1’ at the slicer input (in the absence of noise) • sv is the standard deviation of the noise at the slicer • Since Q(.) is a monotonically decreasing function • of its arguments, we should,
f(x) 0 x b Q(b) 1.0 0.5 0 b Optimal Filters
Optimal Filters • For binary PAM with transmitted levels A1 and A2 and zero ISI we have, • Remember we must maximise, Now, A1, A2 and pR(0) are fixed, hence we must,
Optimal Filters • Noise Power, • The PSD of the received noise at the slicer is, • Hence the noise power at the slicer is, n(t) v(t) HR(w) N(w) Sv(w)
Optimal Filters • We now wish to express the gain term, k, in terms of the energy of the transmitted pulse, hT(t) • From Parsevals theorem, • We know,
Optimal Filters • So, • Giving, • Rearranging yields,
Optimal Filters • We wish to minimise,
Optimal Filters • Schwartz inequality states that, With equality when, Let,
Optimal Filters • So we obtain, All the terms in the right hand integral are fixed, hence,
Optimal Filters • Since l is arbitrary, letl=1, so, Receive filter • Utilising, And substituting for HR(w) gives, Transmit filter
Optimal Filters • Looking at the filters • Dependent on pulse shape PR(w) selected • Combination of HT(w) and HR(w) act to cancel channel response HC(w) • HT(w) raises transmitted signal power where noise level is high (a kind of pre-emphasis) • HR(w) lowers receive gain where noise is high, thereby ‘de-emphasising’ the noise. Note that the signal power has already been raised by HT(w) to compensate.
Optimal Filters • The usual case is ‘white’ noise where, • In this situation, and
Optimal Filters • Clearly both |HT(w)| and |HR(w)| are proportional to, ie, they have the same ‘shape’ in terms of the magnitude response • In the expression for |HT(w)|, k is just a scale factor which changes the max amplitude of the transmitted (and hence received) pulses. This will increase the transmit power and consequently improve the BER
Optimal Filters • If |HC(w)|=1, ie an ideal channel, then in Additive White Gaussian Noise (AWGN), • That is, the filters will have an identical RC0.5 (Root Raised Cosine) response (if PR(w) is RC) • Any suitable phase responses which satisfy, are appropriate
Optimal Filters • In practice, the phase responses are chosen to ensure that the overall system response is linear, ie we have constant group delay with frequency (no phase distortion is introduced) • Filters designed using this method will be non-causal, i.e., non-zero values before time equals zero. However they can be approximately realised in a practical system by introducing sufficient delays into the TX and RX filters as well as the slicer
Causal Response • Note that this is equivalent to the alternative design constraint, Which allows for an arbitrary slicer delay td , i.e., a delay in the time domain is a phase shift in the frequency domain.
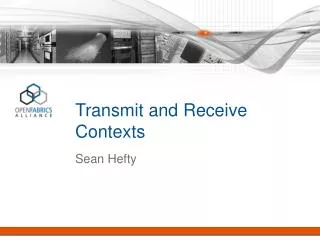
Causal Response Non-causal response T = 1 s Causal response T = 1s Delay, td = 10s
Design Example • Design suitable transmit and receive filters for a binary transmission system with a bit rate of 3kb/s and with a Raised Cosine (RC) received pulse shape and a roll-off factor equal to 1500 Hz. Assume the noise has a uniform power spectral density (psd) and the channel frequency response is flat from -3kHz to 3kHz.
Design Example • The channel frequency response is, HC(f) HC(w) 0 f (Hz) w (rad/s) -3000 -2p3000 3000 2p3000
Design Example PR(f) • The general RC function is as follows, T 0 f (Hz)
Design Example • For the example system, we see that b is equal to half the bit rate so, b=1/2T=1500 Hz • Consequently, PR(f) T 0 f (Hz) 1500 3000 2p1500 2p3000 w(rad/s)
Design Example • So in this case (also known as x=1) where, • We have, Where both f and b are in Hz • Alternatively, Where both w and b are in rad/s
Design Example • The optimum receive filter is given by, • Now No and HC(w) are constant so,
Design Example • So, Where a is an arbitrary constant. • Now, • Consequently,
Design Example • Similarly we can show that, • So that,
Summary • In this section we have seen • How to design transmit and receive filters to achieve optimum BER performance • A design example