Download
1 / 46
460 likes | 487 Views
Explore the distinctions between rotational and circular motions, angular velocity, and acceleration in the study of motion physics. Learn about rotational kinetic energy, moments of inertia, and how to calculate torque in various scenarios.

E N D
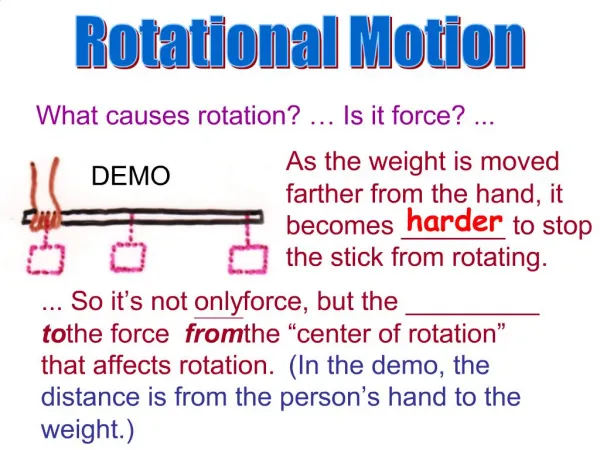
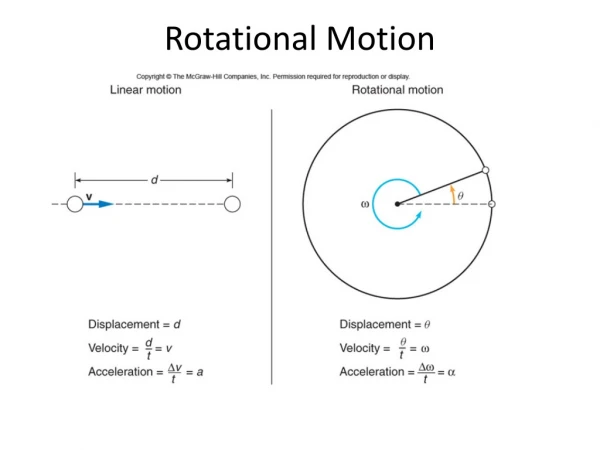
Translational Motion Translational motion is the motion by which a body (or its the center of mass) shifts from one point in space to another. One example of translational motion is the motion of a bullet fired from a gun. Rotational Motion Rotational motion deals only with rigid bodies. A rigid body is an object that retains its overall shape, meaning that the particles that make up the rigid body remain in the same position relative to one another. A wheel and rotor of a motor are common examples of rigid bodies that commonly appear in questions involving rotational motion. Difference between rotational and Circular motions In rotational motion, a rigid body of significant size is studied, and it is rotating about one particular axis. Speed varies significantly throughout the body's fibers. Circular motion is a special case of rotational motion.
Angular velocity and acceleration are vectors quantities, while finite angular displacements are not vector quantities, the reason being that they do not obey the law of vector addition. This law asserts that the order in which vectors are added does not affect their sum. However finite angles under addition tend towards commutivity as the angles become very small. Infinitesimal angles do commute under addition, making it possible to treat them as vectors.
A particle moving in circular path, ar=v2/r (a) yes, (b) no, (c) yes, (d) yes
Rotational Kinetic Energy The total kinetic energy of an extended object can be expressed as the sum of the translational kinetic energy of the center of mass and the rotational kinetic energy about the center of mass. Work-Energy Principle The expressions for rotational and linear kinetic energy can be developed in a parallel manner from the work-energy principle. mad = m {(v 2 - v02)/2}dW = 1/2m(v 2 - v02) = KEf - KEi.
Table 10-2 gives the results of such integration for nine common body shapes and the indicated axes of rotation. 1, 2, 4, and 3
The moment of inertia is minimal when the rotation axis passes through the center-of-mass and increases as the rotation axis is moved further from the center-of-mass. I = Icom + Mh2 Here M is the mass, h is the distance from the center-of-mass to the parallel axis of rotation, and Icom is the moment of inertia about the center of mass parallel to the current axis.
If a torque would cause counterclockwise rotation, it is positive. If it would cause clockwise rotation, it is negative. 1 and 3 tie, 4, then 2 and 5 tie (=zero)
•47 A small ball of mass 0.75 kg is attached to one end of a 1.25-m-long massless rod, and the other end of the rod is hung from a pivot. When the resulting pendulum is 30o from the vertical, what is the magnitude of the gravitational torque calculated about the pivot?
The force on the disk due to the cord acts at distance r =R and is tangent to the rim of the disk. Therefore, its torque is -RT,