Download

1 / 50
500 likes | 813 Views
Digital Terrain Modelling. 第 3 章 DTM 源数据获取技术. Contents. 3.1 Data sources for digital terrain modelling 3.2 Photogrammetry 3.3 Radargrammetry and SAR Interferometry 3.4 Airborne laser scanning (Lidar) 3.5 Cartographic digitisation 3.6 GPS for direct data acquisition;and

E N D
Digital Terrain Modelling 第3章 DTM源数据获取技术
Contents 3.1 Data sources for digital terrain modelling 3.2 Photogrammetry 3.3 Radargrammetry and SAR Interferometry 3.4 Airborne laser scanning (Lidar) 3.5 Cartographic digitisation 3.6 GPS for direct data acquisition;and 3.7 The comparison between DTM data from different sources
3.1 Data sources for digital terrain modelling • Data sources means the materials from which data can be acquired for terrain modelling • DTM source data means data acquired from data sources of digital terrain modelling
CAD model Spatial Data Acquisition towards Geomatics • 从单一传感器/多处理设备到多传感器、单一处理平台技术
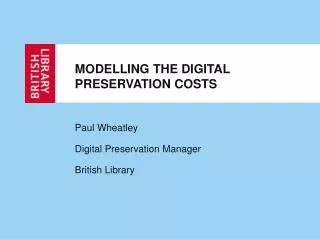
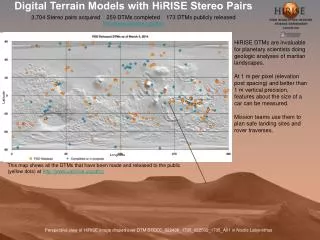
DEM Cost vs. Vertical Accuracy Aerial Photography $1,000 LIDAR ) $100 2 Unit Price ( US $ / km SPOT Satellite $10 Airborne InSAR Satellite Stereo SAR $1 100 10 1 0.1 Vertical Accuracy (m) RMS Increasing Detail Mercer, 2004
History of Earth Observing Satellites ZHOU Guoqing, 2005
High Resolution EOS Plan of China HREOS Multiple platforms space born >100km near space 20-100km airborne <20km 可见光 多/高光谱 紫外 微波 激光 红外 Multiple sensors Resource and environment Agriculture and forest Regional planning Public security and emergency response Multiple applications
Different techniques for different sources • Field surveying by using total station theodolite and GPS for direct measurement from terrain surfaces • Cartographic digitization by using existing topographic maps and digitisers • Photogrammetry by using stereo-pairs of aerial (or space) images and photogrammetric instruments • Laser scanning: actively providing its own illumination in the form of lasers • SAR: radargrammetry和interferometry, actively providing its own illumination in the form of microwaves
From terrain surface • The continents occupy 29.2% of the earth’s surface. Relief varies from place to place, and is covered by natural and cultural features, apart from water • 具体采用何种数据源和相应的生产工艺一方面取决于这些源数据的可获得性,另一方面也取决于DEM的分辨率、精度要求、数据量大小和技术条件等
From aerial and space images • 航空影像一直是地形图测绘和更新最有效也是最主要的数据源 • 近年来出现的高分辨率遥感图像如1-m分辨率的IKONOS图像被认为是快速获取高精度、高分辨率DEM最有希望的数据源
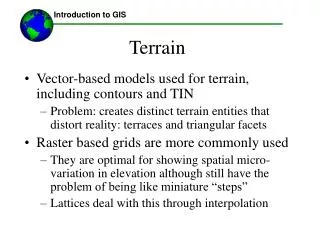
From aerial and space images Aerial photographs can be classified into different types based on different criteria: • Based on colour: colour (true or false) and monochromatic photographs • Based on the attitude of photography: vertical (i.e. main optical axis vertical), tilted(3), and oblique (>3) photographs. Commonly used aerial photographs are tilted photograph • Based on angular field of view: normal, wide angle and super wide angle photography
Aerial camera and aerial photography Aerial photo (negative) f Perspective centre (lens) Aerial photo (positive) H Main optical axis (a) An aerial Camera (b) Geometry of aerial photography • the scale of the aerial photograph: • DEM的精度可以达到航高的0.012%
Form • in analogue form – recorded on films;and • in digital form – scanned/CCD (charge-coupled device) camera • Acquisition • 被动式,记录地面反射的电磁辐射。一般图象 • 主动式,发射并接受电磁波。如雷达图象
From existing topographic maps • 几乎世界上所有的国家都拥有地形图,这些地形图是DEM的另一主要数据源 • 这些数据源可能由于地形图覆盖范围不够或因地图高程数据的质量不高和等高线信息的不足而比较欠缺。比如在中国的西部 • 这些数据往往不满足现势性要求 A topographic map
From existing topographic maps • 在覆盖全国范围的地形图中,比例尺最大的称之为基本比例尺。基本地形图的比例尺在不同国家可能有所不同: 中国 英国 美国 1:50 000 1:10 000 1:24 000 • 不同比例尺的地形图具有不同的等高距。等高线的密度及其本身的精度决定了地形表达的可信度 • topographic mapsthe metricquality • contour map density of contour lines and the accuracy of the contour lines themselves
地形图 地形图的比例尺 比例尺 等高距 特征 大比例尺地形图 1:200,000 >1:10,000 25—100米 综合程度很低,较真实地反映地形 1:100,000 10—40米 中比例尺地形图 1:20,000---1:75,000 作了一定程度的综合,近似地反映地形 1:50,000 10—20米 小比例尺地形图 <1:100,000 综合程度很高,仅反映地形的大致特征 1:25,000 5—20米 1:10,000 2.5—10米 不同比例尺的地形图和它们的地形综合特性 地形图比例尺与等高距的关系
Map scales and commonly used contour accuracy In general, it is expected that the height accuracy of any point interpolated from contour lines will be about to 1/2to 1/3 of the contour interval (CI)
3.2 Photogrammetry • The word photogrammetry comes from Greek words photos (meaning “light”), gramma (meaning that which is drawn or written) and metron (meaning “to measure”). It originally signified measuring graphically by means of light • Photogrammetry and Remote Sensing is the art, science, and technologyof obtaining reliable information from noncontact imaging and other sensor systems about the Earth and its environment, and other physical objects and processes through recording, measuring, analyzing and representation http://www.isprs.org/isprs.html
The development of Photogrammetry • Photogrammetry has undergone four stages of development, each of these cycles are approximately 50 years long: • Plane table photogrammetry 1850 ~ 1900 • Analog photogrammetry 1900 ~ 1960 • Analytical photogrammetry 1960 ~ present • Digital Photogrammetry 1990 ~ present • In 1849, A. Laussedat, an officer in the Engineering Corps of the French Army, is regarded by many as the “father of photogrammetry”
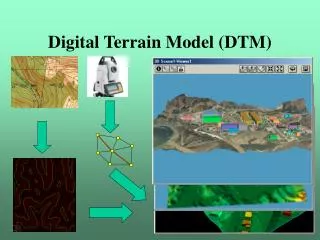
(a) Optical plotter (b) Optical-mechanical plotter (c) Analytical plotter (d) Digital photogrammetric workstation
模拟 摄影测量 数值 摄影测量 解析 摄影测量 数字 摄影测量 输入部分(影像) 模拟 模拟 模拟 数字 模型部分 模拟 模拟 解析 解析 输出部分 模拟 数字 数字 数字 困难度 3 2 1 0 灵活度 0 1 2 3 摄影测量四个阶段的特性
摄影测量的基本原理 • 用立体像对来恢复三维物体的原始形状即形成所谓的立体模型,然后在立体模型上量测物体的三维空间坐标以代替野外的量测 • 在航空摄影时,一般来说在飞行方向上的重叠度为60%,而航线间的重叠度为30% 航向重叠 旁向重叠
立体相对 重叠范围 框标
Two overlapping photographs 3D model To measure the 3-D coordinates of the objects on the stereo model 立体坐标量测仪
S1 S2 a a’ Z Y A X 共线方程式 空间交会 spatial intersection
About the mathematical expression • In the mathematical expression,XYZ is a geodesiccoordinate system;and (i=1,2,3) are the functions of the三个角方位元素(φ, ω, κ) :
Basic orientations • Interior orientation using fiducial marks’ image coordinates to unify the image coordinate system • Relative orientation to restore the stereo model by removing the Y parallax using at least 6 points’ observations • Absolute orientation to scale and orient the stereo model based on the GCP地面控制点。实时摄影测量的基本前提就是自动定向
核线几何Epipolar geometry • 通过摄影基线与任一地面点A做的平面,称为点A的核面,核面与像片的交线称为核线
数字摄影测量 • 立体影像匹配,自动获取数字表面模型DSM
GPS/INS for georeferncing Towards: • On-the-fly processing • Real-time photogrammetry
3.3 Radargrammetry and SAR Interferometry • Radargrammetry acquires DTM data through the measurement of parallax(视差) • InSAR acquires DTM data through the determination of phase shifts between two echoes (两个回波的相位差) 天线 • 一种全天时、全天候数据获取手段 反射波 发射波
InSAR数据处理的特殊性 • 经过预处理后,雷达影像的每一像素不仅包含灰度值,而且还包含与雷达斜距(一般取样到垂直于平台飞行方向的斜距上)有关的相位值,这两个信息分量用一个复数来表达 斜距向 方位 Pixel SAR影像象素的复数表
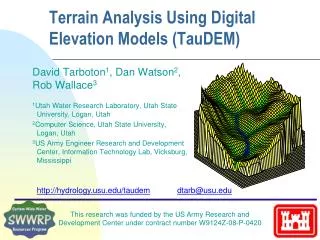
3.4 Airborne laser scanning (Lidar) airborne LIDAR (LIght Detection And Ranging)
Airborne laser scanning system • a laser range finder (LRF) • a computer system to control the on-line data acquisition • a storage medium • a scanner, and • a GPS/INS system for determining the position and orientation of the system
From laser point cloud to DTM • The process of acquiring ALS data: • 数据过滤--noise, outliers or gross errors • 分类--buildings or vegetation • 三维重建 • 激光扫描数据与影像数据的融合 • Accuracy: • height accuracy is in the range of 10-60 cm • planimetric accuracy is 0.1-3m
Manual line following Automated Line-following Automated line following Manual scanning Manual Scanning Automated scanning 3.5 Cartographic digitisation • 数字化后通常还要进行表面建模处理
手扶跟踪数字化 • 地图数字化被认为是GIS之唯一发明 • 效率低 • 精度难以保证
半自动数字化 • 以下工作仍需交互操作: • 系统监控 • 初始化 • 等高线断开与密集区域的处理,比如注记、陡坎和悬崖 • 高程赋值
Examples Original raster map
3.6 全球卫星定位导航系统 • 美国的GPS • 俄罗斯的GLONASS • 欧洲的Galileo • 中国的北斗 • 移动定位平台
DifferentialGPS and its service • Accuracy: 1-10mm • Speed:1-5 sec • Range: 20-150KM constantly compare the real position with the position given by the GPS system, use this error-information to improve GPS performance in a wide range (up to hundreds of kilometers) around the base station
P P D1 D D1 A A B 2 1 (a) From a known point A to determine the position of P (b) From 2 known points A and B to determine the position of P Principles of traditional surveying techniques • through the measurement of distances and/or angles • by theodolites and computerised total stations
获取方式 DEM的精度 速度 成本 更新程度 应用范围 地面测量 非常高(cm) 耗时 很高 很困难 小范围区域,特别的工程项目 摄影测量 比较高 (cm-m) 比较快 比较高 周期性 大的工程项目,国家范围的数据收集 立体遥感(SPOT) 低 很快 低 很容易 国家范围乃至全球范围内的数据收集 GPS 比较高 (cm-m) 很快 比较高 容易 小范围,特别的项目 地形图手扶跟踪数字化 比较低 0.2-0.4mm 比较耗时 低 周期性 国家范围内以及军事上的数据采集,中小比例尺地形图的数据获取 地形图扫描 比较低 0.1-0.3mm 非常快 比较低 激光扫描、干涉雷达 非常高(cm) 很快 非常高 容易 高分辨率、各种范围 3.7 A comparison between DTM data from different sources
性能 卫星影像 航空影像 地面影像 航空点云 地面点云 准确性 低 一般/高 高 高 高 分辨率 低 一般/高 高 一般 高 周期 快速 一般 低 一般 高 成本 低 一般 高 高 高 纹理 低 一般 高 无 无 三维空间数据获取方法比较