Download
1 / 12
160 likes | 428 Views
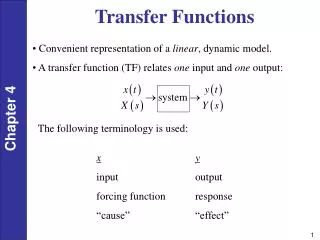
Transfer Functions. The transfer functionRepresent relation between input U(s)

E N D
1. Transfer Functions Transfer functions
Standard process inputs
First-order systems
Simulink example
Integrating systems
2. Transfer Functions The transfer function
Represent relation between input U(s) & output Y(s) in the Laplace domain
Usually denoted as G(s)
Y(s) = G(s)U(s)
Only applicable to linear models!
Deviation variables
Defined as difference between variable and its steady-state value
Transfer functions always specified in terms of deviation variables
Y�(s) = G(s)U�(s)
Usually often omit primes for notational simplicity
3. Transfer Function Example Stirred tank heater
Steady-state equation:
Initial conditions:
Subtract steady-state equation
4. Transfer Function Example cont. Laplace transform
Rearrange noting that T�(0) = 0
Definitions
Transfer functions � 1st-order system
5. Properties of Transfer Functions Additive property
Y(s) = G1(s)U1(s)+ G2(s)U2(s)
Multiplicative property
Y2(s) = G1(s)G2(s)U(s)
ODE equivalence
6. Standard Process Inputs Step input
Ramp input
Rectangular pulse input
7. System Order General transfer function
System order
Order of the denominator polynomial D(s)
Generally equal to the number of ODEs from which G(s) was derived
First-order system
Second-order system
8. First-Order System Standard form
Stirred tank heater
Step response
9. Ramp Response
10. Sinusoidal Response
11. Simulink Example: sininput.mdl First-order system:
Sinusoidal input:
Simulink simulation
12. Integrating Systems Liquid storage tank
Deviation model
Laplace domain
Step response
Integrating systems do not have a steady-state gain