Download
1 / 15
150 likes | 164 Views
A Hierarchical Approach to Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles. Jin Kim Ren é Vidal David Shim Omid Shakernia Shankar Sastry UC Berkeley. Outline. Pursuit Evasion Game Scenario Previous Work Hierarchical Control Architecture

E N D
A Hierarchical Approach to Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles Jin Kim René Vidal David Shim Omid Shakernia Shankar Sastry UC Berkeley
Outline • Pursuit Evasion Game Scenario • Previous Work • Hierarchical Control Architecture • Implementation on Ground/Air Vehicles • Experiment/Simulation Platform • Evaluation of Game Strategies • Speed, Sensing, Intelligence • Experimental & Simulation Results • Conclusions and Current Research
Scenario Evade!
Probabilistic Map Building Measurements Step sensor model Prediction step: evader motion model Hespanha, et. al. [CDC ’99, CDC ‘00] • Optimal pursuit policies computationally infeasible • Greedy Pursuit / random evader
PEG on UAVs and UGVs • Vidal et. al. [ICRA ‘01] • Hierarchical architecture • Implement regulation layer control • Kim et. al. [CDC ’01] • Implement high level strategies • Global-max pursuit • Intelligent evader • Evaluate Pursuit Policy
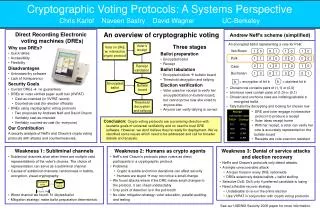
strategy planner map builder • position of evader(s) • position of obstacles • position of pursuers communications network obstacles detected Desired pursuers positions pursuers positions evaders detected tactical planner vehicle-level sensor fusion obstacles detected tactical planner & regulation trajectory planner state of helicopter & height over terrain regulation control signals [4n] actuator positions [4n] • obstacles detected • evaders detected lin. accel. & ang. vel. [6n] inertial positions [3n] height over terrain [n] Exogenous disturbances vision actuator encoders INS GPS ultrasonic altimeter agent dynamics terrain evader Hierarchical Architecture
UAV UGV Vision, Communication, Path Planning MATLAB/ Simulink Real-time Control Experiment/Simulation Platform Tactical Planner Navigation Computer Strategic Planner Map Builder Tactical Planner Robot Controller
UAV model UGV model MATLAB/ Simulink Experiment/Simulation Platform System ID model, Camera model, INS/GPS model UAV Simulator Strategic Planner Map Builder Robot model, Camera model, Dead reckoning Pioneer Simulator
PEG Experiment • PEG with four UGVs • Global-Max pursuit policy • Simulated camera view • (radius 7.5m with 50o FOV) • Pursuer=0.3m/s Evader=0.1m/s
Pursuit Policy: Sensing, Intelligence, Speed • Pursuit Policy • Greedy • Global-max • Visibility Region • Forward View • Omni-directional View • Evasion Policy • Random • Global-min • Evader speed
Conclusions • Conclusions • Hierarchical architecture applied to control multiple agents for pursuit evasion scenario • Evaluated strategies vs. speed, sensing and intelligence • Global-max outperforms greedy in a real scenario • Forward view outperforms Omni-view Vision • Agrees with biological predator/prey vision systems • Current Research • Multi-Body Structure from Motion for Pursuit-Evasion Games [submitted IFAC ’02] • Collision Avoidance and UAV Path Planning • Monte Carlo based learning of Pursuit Policies