Download
1 / 1
10 likes | 160 Views
Absolute Accuracy. GPS. DGPS. Position Roll,Pitch Heading. GPS/INS Integration Kalman Filter. 200 Hz. IMU. DQ x, y, z D V x, y, z. 3 x Gyro. 3 x Accel. 1Hz. Lat, Long, Altitude. GPS remote. Kinematic Dif. GPS. 1Hz. DGPS correction. 4 - 6m 0.015deg 0.08 deg.

E N D
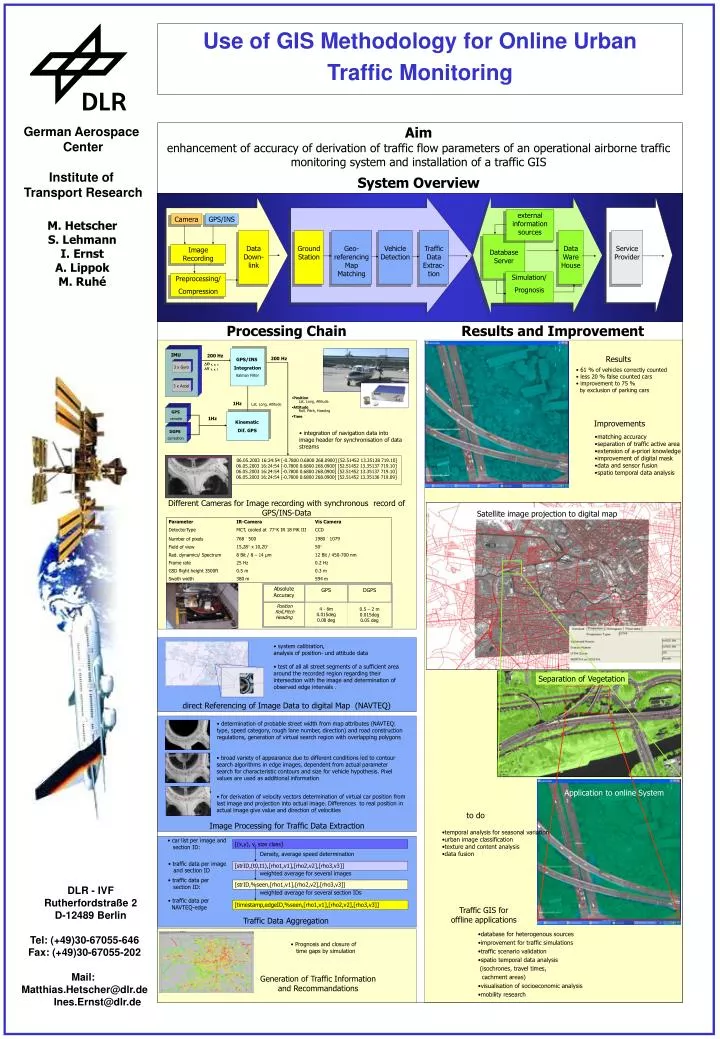
Absolute Accuracy GPS DGPS Position Roll,Pitch Heading GPS/INS Integration Kalman Filter 200 Hz IMU DQ x,y,z DVx,y,z 3 x Gyro 3 x Accel 1Hz Lat, Long, Altitude GPS remote Kinematic Dif. GPS 1Hz DGPS correction 4 - 6m0.015deg0.08 deg 0.5 – 2 m0.015deg 0.05 deg • car list per image and • section ID: [(x,y), v, size class] Density, average speed determination • traffic data per image • and section ID [strID,(t0,t1),[rho1,v1],[rho2,v2],[rho3,v3]] weighted average for several images • traffic data per • section ID: [strID,%seen,[rho1,v1],[rho2,v2],[rho3,v3]] weighted average for several section IDs • traffic data per • NAVTEQ-edge [timestamp,edgeID,%seen,[rho1,v1],[rho2,v2],[rho3,v3]] Use of GIS Methodology for Online Urban Traffic Monitoring German Aerospace Center Institute of Transport Research Aim enhancement of accuracy of derivation of traffic flow parameters of an operational airborne traffic monitoring system and installation of a traffic GIS System Overview external information sources Camera GPS/INS M. Hetscher S. Lehmann I. Ernst A. Lippok M. Ruhé Data Down-link Ground Station Geo-referencingMap Matching Vehicle Detection Traffic Data Extrac-tion Data Ware House Service Provider Database Server Image Recording Simulation/ Prognosis Preprocessing/ Compression Processing Chain Results and Improvement Results 200 Hz • 61 % of vehicles correctly counted • less 20 % false counted cars • improvement to 75 % • by exclusion of parking cars • Position Lat, Long, Altitude • Attitude Roll, Pitch, Heading • Time Improvements • integration of navigation data into • image header for synchronisation of data • streams • matching accuracy • separation of traffic active area • extension of a-priori knowledge • improvement of digital mask • data and sensor fusion • spatio temporal data analysis 06.05.2003 16:24:54 [-0.7800 0.6800 268.0900] [52.51452 13.35138 719.10] 06.05.2003 16:24:54 [-0.7800 0.6800 268.0900] [52.51452 13.35137 719.10] 06.05.2003 16:24:54 [-0.7800 0.6800 268.0900] [52.51452 13.35137 719.10] 06.05.2003 16:24:54 [-0.7800 0.6800 268.0900] [52.51452 13.35136 719.09] Different Cameras for Image recording with synchronous record of GPS/INS-Data Satellite image projection to digital map • system calibration, • analysis of position- und attitude data • test of all all street segments of a sufficient area around the recorded region regarding their intersection with the image and determination of observed edge intervals . Separation of Vegetation direct Referencing of Image Data to digital Map (NAVTEQ) • determination of probable street width from map attributes (NAVTEQ: type, speed category, rough lane number, direction) and road construction regulations, generation of virtual search region with overlapping polygons • broad variety of appearance due to different conditions led to contour search algorithms in edge images, dependent from actual parameter search for characteristic contours and size for vehicle hypothesis. Pixel values are used as additional information Application to online System • for derivation of velocity vectors determination of virtual car position from last image and projection into actual image. Differences to real position in actual image give value and direction of velocities to do Image Processing for Traffic Data Extraction • temporal analysis for seasonal variation • urban image classification • texture and content analysis • data fusion DLR - IVF Rutherfordstraße 2 D-12489 Berlin Traffic GIS for offline applications Traffic Data Aggregation • database for heterogenous sources • improvement for traffic simulations • traffic scenario validation • spatio temporal data analysis • (isochrones, travel times, • cachment areas) • visualisation of socioeconomic analysis • mobility research Tel: (+49)30-67055-646 Fax: (+49)30-67055-202 Mail: Matthias.Hetscher@dlr.de Ines.Ernst@dlr.de • Prognosis and closure of • time gaps by simulation Generation of Traffic Information and Recommandations