Download
1 / 17
180 likes | 356 Views
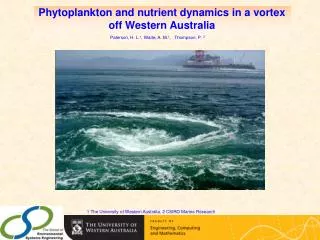
Lift-Off Dynamics in a Simple Jumping Robot. 499290527 光四 朱文萍 指導老師 : 梁君致老師. 大綱. 儀器 介紹 預期結果 實驗結果 和 的 分析 結論. Experiment. Actuator. spring. g. 0.259g. Expect. x. A=. A=4mm. =. =3. actuato r. actuato r. actuato r. actuato r. +. w ith. ( ). ③. ②. ①. Optimal stutter jump .

E N D
Lift-Off Dynamics in a Simple Jumping Robot 499290527 光四 朱文萍 指導老師:梁君致老師
大綱 儀器介紹 預期結果 實驗結果 和的分析 結論
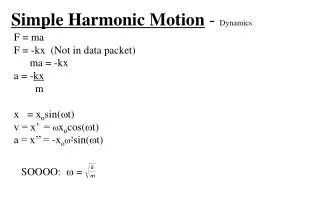
Experiment Actuator spring g 0.259g
x A=
= =3 actuator actuator actuator actuator
+ with
③ ② ①
(with Since stutter jump have lower optimal than signal jump
Two ways to reach the highest point (1)Single jump with faster frequency than ) (2)Stutter jump with lower frequency than )
You can used achieve the same jump height using a lower power, lighter, cheaper actuator.