Download
1 / 12
120 likes | 427 Views
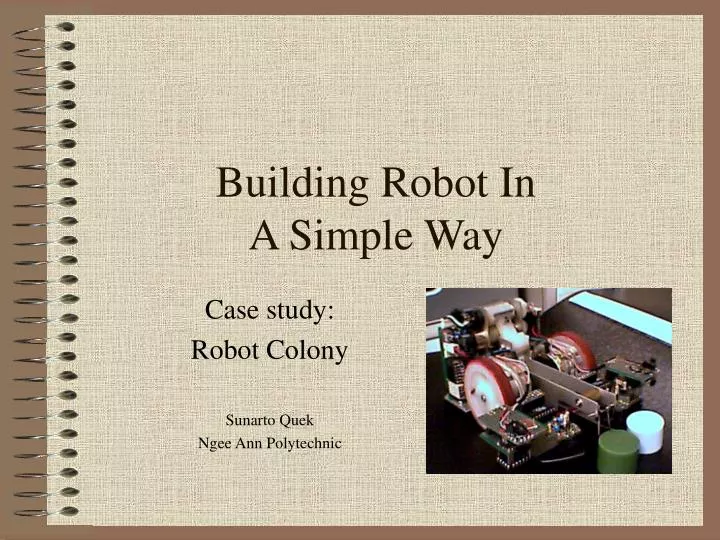
Building Robot In A Simple Way Case study: Robot Colony Sunarto Quek Ngee Ann Polytechnic Content Technology domains in solving robotic problems Case study: Robot Colony Collecting pellets Differentiating pellets Searching pellets Locating disposing area Conclusion Q&A

E N D
Building Robot In A Simple Way Case study: Robot Colony Sunarto Quek Ngee Ann Polytechnic
Content • Technology domains in solving robotic problems • Case study: Robot Colony • Collecting pellets • Differentiating pellets • Searching pellets • Locating disposing area • Conclusion • Q&A Sunarto Quek, Ngee Ann Polytechnic
Technology Domains • Robotic problems • Can be solved at different technology domains • Example • To align an object for grabbing • Mechanical domain – use mechanical guide • Electronic domain – use sensors • Computation domain – use vision • Lower vs Higher domain • Lower (mechanical) is simpler but less flexibility Sunarto Quek, Ngee Ann Polytechnic
Case Study: Robot Colony • Objective • To collect pellets of two different colours and dispose them at their designated place • Tasks • To search pellets • To collect pellets • To differentiate pellets • To locate disposing area and dispose the collected pellets Sunarto Quek, Ngee Ann Polytechnic
Collect Pellet • Subtask 1 • To align gripper with pellet • Solution • Use mechanical guide • Use vision? • May not be accurate due to: • Uneven colour of a pellet • Uneven surrounding light and shadow • Several pellets lump together Sunarto Quek, Ngee Ann Polytechnic
Collect Pellet … • Subtask 2 • To hold pellet • Solution • Use mechanical gate • Use motors? • Could be better but extra cost, programming and circuitry Sunarto Quek, Ngee Ann Polytechnic
Differentiate Pellet • Use vision or colour detector? • Expensive and may not be accurate due to shadowing and uneven colour and lighting • Use simple infrared sensor • Notice that blue pellets are much brighter than green pellets • Differentiate by reflected intensity Sunarto Quek, Ngee Ann Polytechnic
Search • Subtask 1 • To detect nearby pellets • Solution • Two infrared sensors, each looks on the left and right side of the robot • Front sensors not needed as pellet in front will be collected as the robot move forward • Vision? • Better but must take care of lighting problem Sunarto Quek, Ngee Ann Polytechnic
Search … • Subtask 2 • Cover unexplored area • Solution • Go to centre and circle out • Continue from last position after disposing pellet • Mapping the arena? • Need accurate localization • But not many good landmark Sunarto Quek, Ngee Ann Polytechnic
Locate Disposing Area • Subtask • To find robot’s orientation • Solution • Ensure each turning is about 90 deg • Remember the orientation • Error can be corrected by aligning sensors to line • Compass? • Better, but must take care of surrounding magnetic field Sunarto Quek, Ngee Ann Polytechnic
Locate Disposing area … • Once orientation is found • Robot is at the border • Turn 90 deg and move until the outer front base sensor detect lines • Disposing area is then located Sunarto Quek, Ngee Ann Polytechnic
Conclusion • A simple robot colony was built • No motor required for collecting pellet • Simple IR sensor to differentiate pellets • Strategic sensor placement to maximize pellets searching • Robot can be built in a simple way • By looking for solutions at lower technology domain Sunarto Quek, Ngee Ann Polytechnic