Download

1 / 27
280 likes | 410 Views
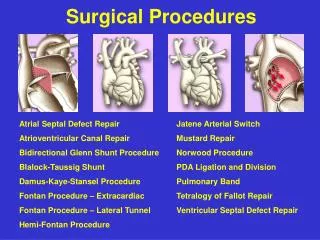
Phantom II. Phantom I. Simulation of Surgical Procedures in Virtual Environments. Cagatay Basdogan, Ph.D . College of Engineering, Koc University. Notes & Equations & Matlab Code are online: http://network.ku.edu.tr/~basdogan. Significance:. VR-based training.

E N D
EURON Summer School 2003 Phantom II Phantom I Simulation of Surgical Procedures in Virtual Environments Cagatay Basdogan, Ph.D. College of Engineering, Koc University • Notes & Equations & Matlab Code are online: • http://network.ku.edu.tr/~basdogan
EURON Summer School 2003 Significance: VR-based training • to train and certify medical personnel • to reduce the use of animals in training • to test new surgical devices and procedures
EURON Summer School 2003 Overview: Tissue Mechanics Simulation of MIS procedures Training Transfer Device Design Real-time Interaction
EURON Summer School 2003 System: Laparoscopic Instruments Haptic Displays Visual Display
EURON Summer School 2003 Challenges: Real-time Display Physically-Based Modeling • Graphics (30 Hz) • Haptics (1000 Hz) • 1 msec ! Deformation Tissue/organ model Loading via tool Force on the tool FEM ? . . . F = MU + CU + KU (dynamic analysis) F: force Tissue Characteristics Node (e.g. 100) • nonlinear • anisotropic • hysteresis • non-homogeneous • membrane+bending elements • 6-dof for each node • Stiffness Matrix : K (600x600), diagonal M and C • 600 coupled equations ! complex !
EURON Summer School 2003 Topics: A) Collision detection and computational models of surgical instruments B) Physically-based modeling for simulating soft tissue behavior C) Haptic rendering of deformable objects D) Software and hardware integration
EURON Summer School 2003 Polyhedron Particles Line Segments Case Study: Simulation of Catheter Insertion into the Cyctic Duct Cyctic Duct Catheter Laparoscopic Forceps What you see ... What is really happening ...
EURON Summer School 2003 Principles of Collision Detection(object-object is too expensive !) Line Segment Point-Object - Object Polygons tip Points Line Segments Polygons (e.g. catheter - cyctic duct) (e.g. forceps - cyctic duct)
EURON Summer School 2003 Computational Models of Laparoscopic Instruments Group A Group B Point-based rendering Ray-based rendering
EURON Summer School 2003 Physically-based modeling for simulating soft tissue behavior • Desired properties of deformable models • Modeling of deformable objects • 1) particle-based • 2) FEM-based • Implementing constraints • Problems with particle-based techniques • Problems with FEM techniques
EURON Summer School 2003 Desired properties of force-reflecting deformable models • reflect stable forces • display smooth deformations • handle various boundary conditions and constraints • display “physically-based” behavior in real-time
EURON Summer School 2003 e Y Z X Modeling of Deformable Objects visit my web-site for the details : http://eis.jpl.nasa.gov/~basdogan Particle-based : node1 F = ma a (t + Dt) = F/m v (t + Dt) = v(t) + Dt a (t + Dt) p (t + Dt) = p(t) + Dt v (t + Dt) Fspring node2 Fdamping Fgravity FEM-based : F = KU (static analysis) . . . F = MU + CU + KU (dynamic analysis)
EURON Summer School 2003 Comparison Particle-based FEM-based easy to implement, flexible comprehensive Hybrid Approach
EURON Summer School 2003 Constraints (see my SIGGRAPH’99 Course Notes for details, http://eis.jpl.nasa.gov/~basdogan) • Examples: • a node is fixed in 3D space • a node is constrained to stay on a path • curvature constraint • constant volume Implementation: 1) Particle-based models (Ref: Witkin/Baraff, SIGGRAPH’97 Notes) a) Penalty b) Lagrange multipliers 2) FEM
EURON Summer School 2003 Problems with Particle-Based Techniques A) Adding damping to stabilize oscillations B) Adding constraints C) Too many elements stiffer system # of iterations Dt adaptive step size? D) Too few elements difficult to preserve volume E) Non-homogeneous distribution of elements finer adjustment of spring and damper coefficients
EURON Summer School 2003 Problems with FEM Techniques requires A) Change in topology Re-meshing Modeling approximations B) Dynamic analysis Pre-computation C) Matrix inversion Simplifications in the geometry D) Memory allocation
EURON Summer School 2003 Tnet F2 F1 Fnet Ray-based Point-based Reaction force (c) (a) (b) IHIP HIP
EURON Summer School 2003 Computational Architecture Position Orientation Geometry Collision Detection Physics- Based Deformable Model Force Displacement
EURON Summer School 2003 D) Software and Hardware Integration: tips and tricks • Programming tips to speed up your computations • Modeling tips to speed up your computations • Simulation set-up
EURON Summer School 2003 Programming tips to speed up your computations • Synchronize your haptic and graphic loops through a shared database Haptic Database Visual Thread Shared Database • Construct a multi-layered computing structure if possible Display Images 30 Hz Compute Forces/Disp. 200 Hz Display Forces 1 kHz Extrapolate Forces/Disp. Thread #3 Thread #1 Thread #2 • Construct a hierarchical data structure • Update your geometric coordinates less frequently F Dt haptic = 0.001 sec (display forces) Dt iteration= 0.01 sec (update coordinates)
EURON Summer School 2003 Modeling tips to speed up your computations • consider local deformation • take advantage of single point interactions • condense your matrices in FEM • consider modeling approximations for dynamic FEM analysis • pre-compute (matrices, unit displacements/force) • loosely couple your force and deformation model • take advantage of human perceptual limitations
EURON Summer School 2003 loose coupling of force and displacement models local deformation point-based interactions human perceptual limitations condensation • eliminate internal elements • eliminate rotational dofs
EURON Summer School 2003 Modeling approximations: Modal Analysis . . . F = MU + CU + KU (global coordinates, N COUPLED equations !) U = F X . . . fi = Xi + aiXi + w2iXi i = 1, …, N (modal coordinates, DECOUPLED !) Compute F modal reduction (R << N) U, U, U solve for XR , XR, XR
EURON Summer School 2003 Spectral Lanczos Decomposition (not diagonal !) K’ NxN Lanczos Decomposition (diagonal !) L (M << N) MxM
EURON Summer School 2003 Simulation of Catheter Insertion Real Virtual Simulation Set-Up
EURON Summer School 2003 Virtual Geometric Model
EURON Summer School 2003 • tutorial notes are available online: • Siggraph’99, MMVR’00, MMVR’01 • http://network.ku.edu.tr/~cbasdogan • Acknowledgement: • haptic rendering • Chih-Hao Ho, Mandayam Srinivasan, MIT • design of force reflecting grippers • Ela Ben-Ur, Mark Ottensmeyer, Ken Salisbury, MIT • discussions on finite element modeling • Suvranu De, MIT • discussions on medical procedures, videos, and several OR visits • Steve Small, Steve Dawson, David Rattner, MGH-Harvard Medical School • laparoscopic trainer, several visits to animal facility • Cynthia Barlow (Harvard Medical School) • set-up • Chih-Hao Ho, MIT