Download
1 / 20
200 likes | 211 Views
One Powerful Environment and Testbed for Human-Level AGI Would Be a “Virtual School” in an Open Source Virtual World Enhanced with Robot Simulation and Bead Physics Ben Goertzel & Stephan Vladimir Bugaj.

E N D
One Powerful Environment and Testbed for Human-Level AGI Would Be a “Virtual School” in an Open Source Virtual World Enhanced with Robot Simulation and Bead PhysicsBen Goertzel & Stephan Vladimir Bugaj
Hypothesis 1: Human-like AGI reflects, in large part, an adaptation to the “everyday world” humans interact with (including social and physical interactions) Hypothesis 2: A reasonably rich “virtual school” environment can encapsulate the AGI-critical aspects of the everyday world
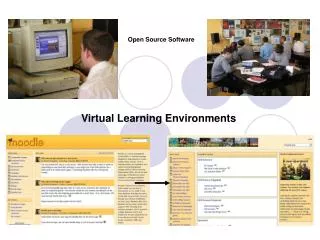
Current virtual world platforms have some fairly severe limitations, which fortunately can be remedied with effort Agent control relies on animations and other simplified mechanisms, rather than having virtual servomotors associated with each joint of an agent’s skeleton Object-object interactions are oversimplified, making tool use difficult
Partial solution: Integration of a robot simulator with a virtual world engine + Player / Gazebo: 3D robot control + simulation framework OpenSim, Croquet, etc.: open-source virtual world It seems feasible to replace OpenSim or Croquet’s physics engine with appropriate components of Player/Gazebo, and make coordinated client & protocol modifications
Current Virtual Worlds lack fluids, powders, pastes, fabrics … they don’t completely implement “naïve physics”
One likely solution: bead physics Spherical beads with specially designed adhesion properties can emulate fluids, fabrics, pastes, strings, rubber bands, etc. Bead physics can be added to virtual world physics engines
Virtual School (VIRTUS) Proposal • Make VIRTUS servers open for use by all AI researchers • AI systems communicate with virtual world proxy via XML • Multiple AIs and humans may flexibly interact • Researchers may also run their own VIRTUS servers • Pre-fab bodies available or researchers may create their own • Objects may be scripted in-world or controlled by external scripts Create enhanced version of current OSS virtual world to support Virtual School requirements Modify server, client for more flexible interaction with physics engine and external software Integrate virtual world with Player robot simulator Add bead physics to ODE or other physics engine Add special Environment Control user interface and server plugin to enable flexible configuration and control of environment
Example “Advanced Preschool Level” VIRTUS Tasks
Example “Elementary and Middle School Level” VIRTUS Tasks