Download
1 / 28
280 likes | 296 Views
This article discusses the challenges of handling multiple motion planning queries in various spaces and proposes approaches such as lazy PRM planning and query feasibility estimation.

E N D
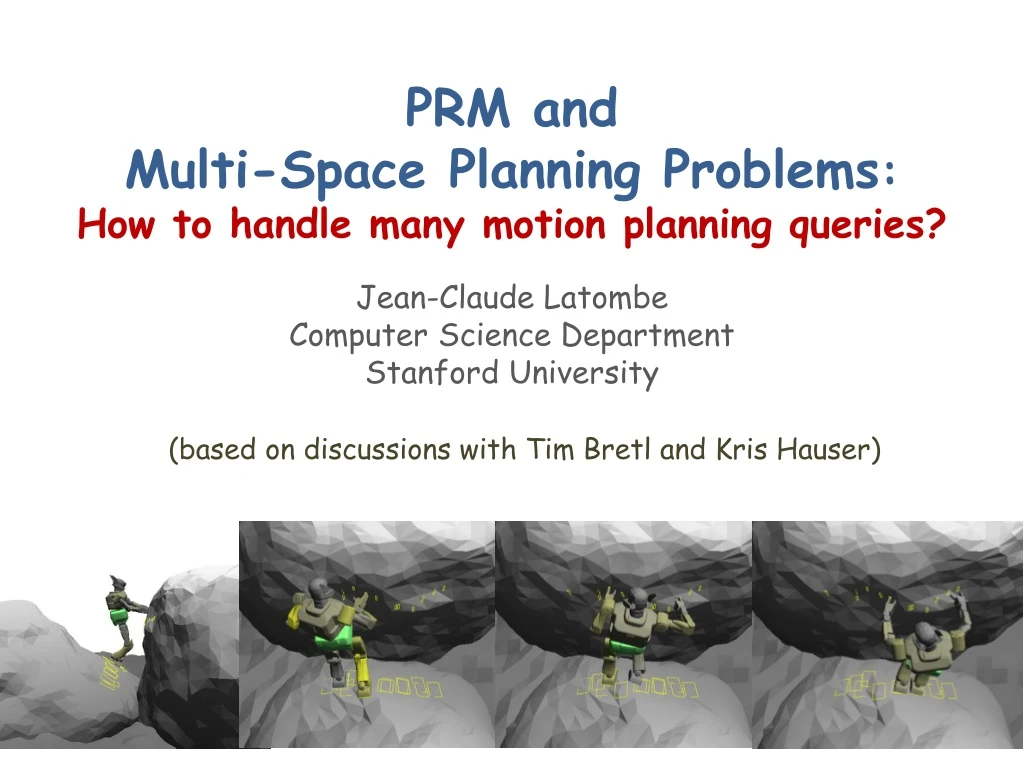
PRM and Multi-Space Planning Problems:How to handle many motion planning queries? Jean-Claude LatombeComputer Science DepartmentStanford University (based on discussions with Tim Bretl and Kris Hauser)
PRM Planning in Single Space • Applicable to robots with many dofs • In expansive configuration spaces:Probabilistically complete + fast convergence • But unable to detect that no solution exists Cutoff on running time
Convergence of a PRM Planner ??? What should be the cutoff time?
Planning in Multiple SpacesExample 1: Climbing Robot 4-contact move 3-contact move
difficult queriesor bad luck? Climbing Robot Dilemma[Bretl, 2005] • Thousands of spaces many PRM queries • Most queries have no solution • Running times for feasible queries are highly variable • Large time cutoff Prohibitive time is wasted on infeasible queries • Small time cutoff Critical queries might not be solved
Other Examples • Navigation on irregular terrain [Hauser, 2008]
Other Examples • Dexterous manipulation
Other Examples • Mechanical assembly
Other Examples • Spatial re-arrangements of movable objects [Stillman and Kuffner, 2007]
Other Examples • Modular reconfigurable robots [Yim]
Other Examples Change battery Go to toolbox • Integration of task and motion planning Grasp screwdriver Go to old battery Unscrew screws Ungrasp screwdriver Grasp old battery Remove old battery
Basic Architecture High-level Planner (graph searching) Many queries are infeasible “climbing-robot” dilemma query result Motion Planner (PRM) Each query involves a distinct configuration space, with its own dimensionality, parameterization, and/or constraints. queries cannot be processed usingone single precomputedroadmap
Possible Approaches • Estimating query feasibility • Lazy PRM planning High-level Planner (graph searching) query result Motion Planner (PRM)
Learning Transition Feasibility[Hauser, 2008] • Create a large dataset of labeled transitions • Train a classifierQ: transition {feasible, non-feasible} • Use classifier to select sequences of spaces with likely feasibletransitions between them • But no work yet on learning feasibility of entire queries (that require connecting two transitions) 4 contacts 3 contacts Non-feasible if empty
Possible Approaches • Estimating query feasibility • Lazy PRM planning High-level Planner (graph searching) query result Motion Planner (PRM)
Lazy PRM Planning[Bohlin & Kavraki, 2000; Sanchez-Ante, 2001] • Observation:PRM planning wastes much time testing that sampled configurations and connections are valid (e.g., free of collision). • Idea:Perform a computation only when there is enough evidence that it may be useful.
g s Lazy Collision Checking of Connections [Sanchez-Ante, 2001] X
g s Lazy Collision Checking of Connections [Sanchez-Ante, 2001]
Rationale • Configuration spaces are rarely chaotic: so, the connection between close valid configurations has high probability of being valid • Most of the time spent by a PRM planner is in testing connections • Most valid connections will not be part of the final solution • Testing connections is more expensive for valid connections than for invalid ones Postpone testing a connection until the test is likely to be useful
Extending Lazy PRM Planning Create a bag of fine-grain computational probes: Nodesampling Node Connection
Extending Lazy PRM Planning • Sample a node and partially test if it is valid p1 p8 p7 p6 p5 p4 p3 p2 r’ r d d > r+r’ p1 = 1 d ≤ r+r’ p1 ~ d/r+r’
Extending Lazy PRM Planning • Create connection and partially test if it is valid p23 p38 p12 p24 p4 p1 p8 p7 p5 p3 p2 p6 p47 p45 p46
Extending Lazy PRM Planning • Test further that a node is valid p23 p38 p12 p24 p8 p1 p3 p2 p6 p5 p4’ p7 p47 p45 p46
Extending Lazy PRM Planning • Test further that a connection is valid p23 p38 p12 p24 p4’ p1 p8 p7 p5 p3 p2 p6 p47’ p45 p46
Potential Advantages • More choices opportunity for much smarter, more efficient strategies • More flexibility in distributing computation over several spaces, e.g., focus on queries that have the highest probability of being feasible • Compatibility with probabilistic modeling of uncertainty, e.g., probabilistic distribution of obstacles
Conclusion • We will have to live with imperfect motion planners like PRM planners • Important problems require handling many motion planning queries in distinct spaces “climbing-robot” dilemma • Possible approaches to address this dilemma: • Fast and reliable evaluation of query feasibility (e.g., using trained classifiers) • Extended lazy PRM planning
Narrow Passages • I don’t think they are the main issue in PRM planning. • They are unlikely to occur by chance. • Intentionally creating complex narrow passages is not easy. Alpha puzzle