Download
1 / 26
280 likes | 543 Views
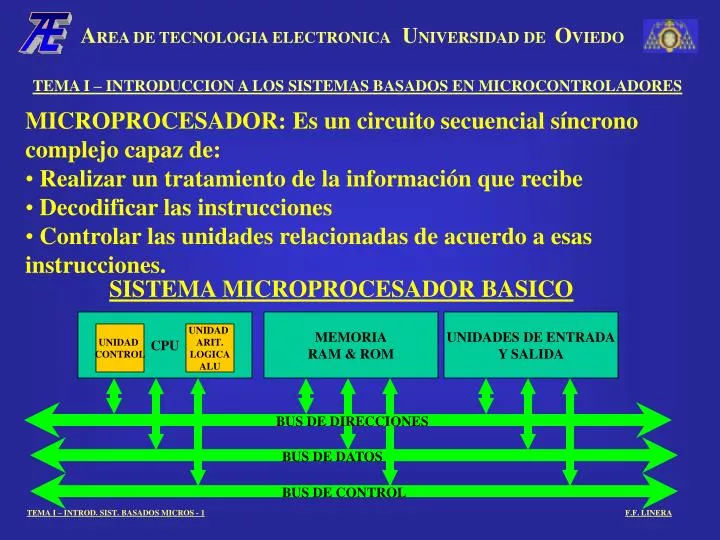
BUS DE DIRECCIONES. BUS DE DATOS. BUS DE CONTROL. TEMA I – INTRODUCCION A LOS SISTEMAS BASADOS EN MICROCONTROLADORES. MICROPROCESADOR: Es un circuito secuencial síncrono complejo capaz de: Realizar un tratamiento de la información que recibe Decodificar las instrucciones

E N D
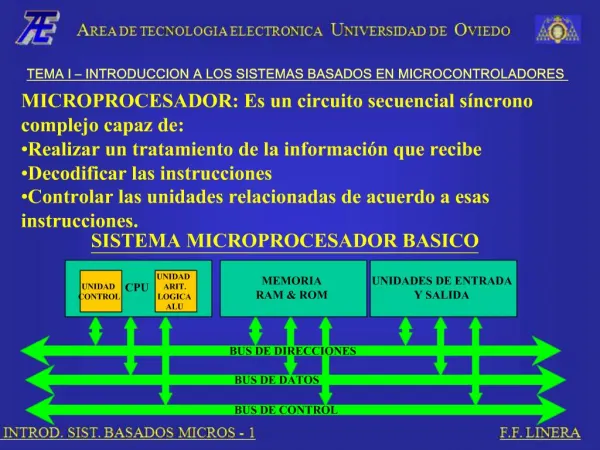
BUS DE DIRECCIONES BUS DE DATOS BUS DE CONTROL TEMA I – INTRODUCCION A LOS SISTEMAS BASADOS EN MICROCONTROLADORES • MICROPROCESADOR: Es un circuito secuencial síncrono • complejo capaz de: • Realizar un tratamiento de la información que recibe • Decodificar las instrucciones • Controlar las unidades relacionadas de acuerdo a esas instrucciones. SISTEMA MICROPROCESADOR BASICO CPU MEMORIA RAM & ROM UNIDADES DE ENTRADA Y SALIDA UNIDAD CONTROL UNIDAD ARIT. LOGICA ALU
DIAGRAMA DE BLOQUES DE UN MICROCONTROLADOR BUS DATOS INTERNO MEMORIA CLOCK CPU ROM VDD LINEAS RAM CONTROL EEPROM MICROCONTROLADOR: PEQUEÑO SISTEMA MICROPROCESADOR EN UN UNICO CHIP REGISTROS DE ESTADO Y DE CONTROL E/S REGISTROS DE DATOS E/S BUSDE DATOS BUFFER DE DATOS GND BUSDE DIRECCIONES LATCH DIRECCIONES
MICROCONTROLADORES EN LA INDUSTRIA • IMAGEN Y SONIDO • AUTOMOVIL • ELECTRODOMESTICOS • MEDICINA Y BIOINGENIERIA • EQUIPOS INFORMATICOS. • COMUNICACIONES • VIDEOJUEGOS • CONTROL INDUSTRIAL
TARJETA DE CONTROL DE BOTONERA DE ASCENSORY COMUNICACIÓN CON EL CONTROL PIC16F84 DESARROLADO POR ATE-UNIOVI MINI-ROBOT CON PIC16F84 TARJETA DE CONTROL DE UN ASCENSOR BASADO EN UN MOTOROLA 68HC11 DESARROLADO POR ATE-UNIOVI TARJETA DE ADQUISICION DE DATOS CON PHILIPS 80C31 EJEMPLOS DE APLICACIONES
APLICACIONES DE CONTROL DE ESTADO Se pasa de un estado a otro en función de cambios en variables externas ó por software. Las salidas tendrán un valor dependiendo del estado o de las transiciones
APLICACIONES DE CONTROL DE LAZO CERRADO Se supervisa y mantiene la variable o variables de salida. Ejemplos: Control de temperatura Control de presion Control de humedad Control de motores REGULADOR SISTEMA A CONTROLAR + REALIMENTACION DE VARIABLES DE SALIDA Y DE CONTROL
EJEMPLO: CONTROL EN LAZO ABIERTO DE UN MOTOR DE CONTINUA MEDIANTE UN MICROCONTROLADOR COP8782 DE NATIONAL
EJEMPLO: CONTROL EN LAZO CERRADO DE UN MOTOR DE CONTINUA MEDIANTE UN MICRO PIC18C452 DE MICROCHIP
DIAGRAMA DE BLOQUES TIPICO DE UN MICROCONTROLADOR CPU INTERFACE SERIE • EJECUTA EL PROGRAMA • GESTIONA EVENTOS • ENVIO Y RECEPCION • DE DATOS ROM CONVERTI- DOR A/D • CONTIENE EL PROGRAMA Y LOS DATOS DE LA APLICACION • ADQUISICION DE • DATOS ANALOGICOS RAM TEMPO- RIZADOR • CONTIENE DATOS TEMPORALES • GENERA SEÑALES • CUENTA EVENTOS • BASE DE TIEMPOS EEPROM PUERTO E/S • CONTIENE DATOS PERMANENTES • INTERFACE DE • PERIFERICOS
En los sistemas microprocesadores, el objetivo esta fijado en alcanzar la máxima capacidad de procesado de información. • En los µC el objetivo consiste en implementar un conjunto de funciones de control de la forma más efectiva economicamente. • Aplicaciones típicas donde el procesado de información no es muy alta. • Como resultado el tamaño y el consumo son muy pequeños, lo que les hace ideales para sistemas portátiles y autónomos.
Cada fabricante ofrece en sus distintas familias una gran variedad de versiones de un mismo µC. • Se diferencian en: • Capacidad y tipo de memoria. • Encapsulado. • Número y tipo de periféricos incluidos en el chip.
Una posible forma de clasificarlos es atender al numero de bits de sus registros internos, lo que se conoce como ancho de palabra del dispositivo. Así se clasifican en µC de 4, 8, 16 y 32 bits. • Mayoría de aplicaciones con micros de 4 y 8 bits, 16 y 32 bits en aplicaciones de alta capacidad de procesado. • Los micros de 4 bits conservan su mercado debido al elevado número de aplicaciones esncillas existentes. • El sector del automovil es el principal responsable del crecimiento del mercado de µC.
CRITERIOS DE SELECCIÓN (I) – TIPO DE MEMORIA ¿Qué cantidad de memoria se necesita para almacenar el programa de control de la aplicación? ¿Qué cantidad de memoria se necesita para almacenar los datos necesarios de la aplicación y su control? Los micros suelen incorporar memoria, cuyo tamaño y tipo suele variar entre los distintos miembros de una familia. No obstante, algunos miembros suelen permitir el conexionado de memoria externa como un componente a parte.
CRITERIOS DE SELECCIÓN (I) – TIPO DE MEMORIA • EPROM (Erasable Programmable Read Only Memory) • Memoria no volatil para guardar código de programa. • Durante la grabación, los datos se guardan en las direcciones deseadas mediante la aplicación de señales de control y tensiones especiales de programación de valor más elevado al normal. • Para su borrado, debe exponerse a rayos ultravioleta que se aplican a través de la ventana que posee en el encapsulado. • Pueden grabarse y borrarse al menos 100 veces y habitualmente muchas más. • OTP (One Time Programmable) • Similar a la EPROM pero no dispone de ventana para su borrado. • Es más barata que la EPROM y, por tanto, una buena opción para almacenar el programa de la aplicación una vez ya finalizado.
CRITERIOS DE SELECCIÓN (I) – TIPO DE MEMORIA • EEPROM ó E2PROM • (Electrically Erasable Programmable Read Only Memory) • Similar a la EPROM pero puede ser borrada electricamente. • Son de baja velocidad, su coste es elevado y el número de veces que puede ser grabada y borrada es limitado (entre 10.000 y 100.000 veces • ROM (Read Only Memory) • El proceso de grabación se realiza en fábrica. Una vez grabada no es posible modificar su contenido. • Solo rentable cuando el número de unidades a producir es elevado. • Si se descubre un error en el programa habrá que desechar todos los µC que se hayan grabado.
CRITERIOS DE SELECCIÓN (I) – TIPO DE MEMORIA • Flash EPROM • Memoria que se puede borrar electricamente y que está desplazando a las EPROM. • Mejor solución que las EEPROM, especialmente cuando se trata de grandes cantidades de memoria pues su borrado es más rápido y puede hacers por grandes bloques o bien borrando directamente todo su contenido.
CRITERIOS DE SELECCIÓN (I) – TIPO DE MEMORIA • RAM • Memoria volátil. Su contenido se pierde cuando se quita la alimentación a menos que se conecte a una batería. • Se usa para almacenar datos de forma temporal y no para guardar el programa de la aplicación como ocurre en los sistemas microprocesadores.
CRITERIOS DE SELECCIÓN (I) – TIPO DE MEMORIA EEPROM ó Flash EEPROM • PROTOTIPO Y DISEÑO INICIAL EPROM u OTP • PRIMERAS • SERIES OTP ó ROM • PRODUCCION EN SERIE • GRANDES TIRADAS (ROM)
CRITERIOS DE SELECCIÓN (II) – PERIFERICOS INTERNOS • Los µC suelen incluir en su interior periféricos especiales que facilitan la tarea de control de la aplicación. • El tipo y número varía de un µC a otro según para las necesidades que están pensados. • Un listado de los más comúnes: • Convertidor A/D • Temporizador/Contador • Temporizador Watchdog • Puertos de E/S • Unidad de comparación y captura • Interface serie
CRITERIOS DE SELECCIÓN (II) – CONVERTIDOR A/D Convierte una señal analógico externa (tensión) en una representación digital de 8, 10, 12 o 16 bits. Se usa en µC orientados a trabajar en instrumentación, registro de datos externos o cualquier aplicación que tenga contacto con el mundo analógico. CRITERIOS DE SELECCIÓN (II) – TEMPORIZADOR/CONTADOR Se utiliza para medir el intervalo de tiempo entre dos sucesos, activar/desactivar señales durante un cierto tiempo o bien contar el números de veces que se produce un suceso (normalmente en forma de flanco de subida o bajada) en una determinasa señal de control. También existen temporizadores con autorecarga, que se recargan a su valor inicial cuando se alcanza el valor de la cuenta y que liberan así de este trabajo a la CPU.
CRITERIOS DE SELECCIÓN (II) – TEMPORIZADOR WATCHDOG Es un temporizador de funcionamiento casi totalmente autónomo dentro del µC, que reiniciliza el mismo si el programa no refresca el watchdog a tiempo. Proporciona un método de recuperación del control del programa de la aplicación en el caso de producirse un fallo de funcionamiento. Es de especial interés en µC que trabajen en entornos con fuertes interferencias electromagnéticas o sistemas de control autónomos que no están sometidos a una vigilancia continua. CRITERIOS DE SELECCIÓN (II) – PUERTOS DE E/S Los µC suelen disponer de varios puertos de entrada/salida digitales que permiten gestionar LEDs, teclados, LCDs, relés, etc. Generalmente un puerto consiste en 8 o menos bits que se pueden programar como entrada o salida
CRITERIOS DE SELECCIÓN (II) – UNIDAD DE COMPARACION Y CAPTURA Se usa para generar cualquier tipo de señales digitales y captura de sucesos: Generacion de pulsos, modulación de anchura de pulsos, medida de anchura de pulsos, etc... De amplio uso en el sector del automovil (control de inyección, ABS, etc) y en aplicaciones industriales (control de motores paso a paso, motores de continua, generación de frecuencias, conversiones digitales-analógicas, etc.. CRITERIOS DE SELECCIÓN (II) – INTERFACE SERIE Se usan para intercambiar datos con el exterior. El intercambio puede ser con comunicaciones asíncronas (SCI o UART) o sincronas (SPI) La fuerte implantacion en el sector del automovil y en la industría han hecho que muchos µC incorporen buses específicos : I2C o CAN
CRITERIOS DE SELECCIÓN (III) – HERRAMIENTAS DE DESARROLLO La elección del µC no solo se basa en cubrir las necesidades de la aplicación. En muchas ocasiones, la mayor influencia viene dada por la existencia de un conjunto completo de herramientas de desarrollo a buen precio y una buena documentación: manuales y notas de aplicación. HERRAMIENTAS DE SOFTWARE HERRAMIENTAS DE HARDWARE Ensamblador Linker o enlazador Simulador Compilador Emulador Placas de evaluación. Analizador lógico
CRITERIOS DE SELECCIÓN (IV) – OTROS Disponibilidad del µC en todas sus versiones (OTP, ventana y máscara). Disponer de programas o subprogramas ya realizados que se puedan aprovechar en nuestra aplicación. A veces escoger un µC más barato puede encarecer el coste de los demás componentes de la aplicación, aumentar el tamaño de la placa y por lo tanto de su coste. Es importante conocer la precisión necesaria de los datos a manejar para escoger entre µC de 4, 8 16 y 32 bits. También si hay partes de programa que tienen un tiempo limitado de ejecución y por lo tanto se deben escoger micros de mayor frecuencia o mayor capacidad de procesado. Si el sistema va a ser portátil, debemos asegurar la posibilidad de funcionamiento en modo de bajo consumo.
SECUENCIA DE DISEÑO ELECCION DEL MICROCONTROLADOR PLANTEAMIENTO DE TAREAS A EJECUTAR IMPLEMENTACION DE PROGRAMAS ERRORES? SI NO GRABACION EN EPROM VERIFICACION ERRORES? NO SI GRABACION EN ROM VERIFICACION ERRORES? NO SI FABRICACION SERIE