Download
1 / 8
80 likes | 421 Views
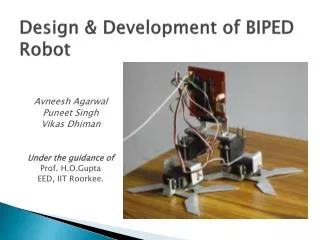
SELF BALANCING BIPED ROBOT. Patent Liability Analysis. Seongwoon Ko Kelton Stefan Jinliang Wei Ankith Cherala. Intro. Self-balancing Biped Robot is a robot that performs fundamental functionality of human legs, such as moving, and changing directions.

E N D
SELF BALANCING BIPED ROBOT Patent Liability Analysis SeongwoonKo Kelton Stefan Jinliang Wei AnkithCherala
Intro • Self-balancing Biped Robot is a robot that performs fundamental functionality of human legs, such as moving, and changing directions. • For the patent analysis, the focus was on • The methods of calculation for the motion. • The methods of balancing the robot.
Existing Patents Pending patent applications
7,119,510 B2: Method of assuming acting point of floor reaction force /assuming joint movement of biped mobile body
7,835,822 B2: Systems and methods for controlling a legged robot using a two-phase disturbance response strategy
2010/0161116 A1:Robot and method of controlling balance thereof
Similarities and Differences • 7,119,510 B2: Floor reaction force position approximation uses similar approach in a way that assumes the midpoint of the contact area to be reaction point. • 7,835,822 B2: Possible conflict with similar two-phase system reflex phase/recovery phase approach. • 2010/0161116 A1: This method uses Finite State Model to reduce the left and right shift of the robot. Similar in the aspect that the robot moves in a finite state to keep the balance.