Download
1 / 11
110 likes | 124 Views
This article discusses the problem of recalibrating virtual sensors and proposes an approach that uses system semantics to detect and correct perturbations in the sensor outputs. It also explores the application of semantics in resource scheduling and presents a demonstration of semantics-based recalibration in a coffee machine and traffic light scenario.

E N D
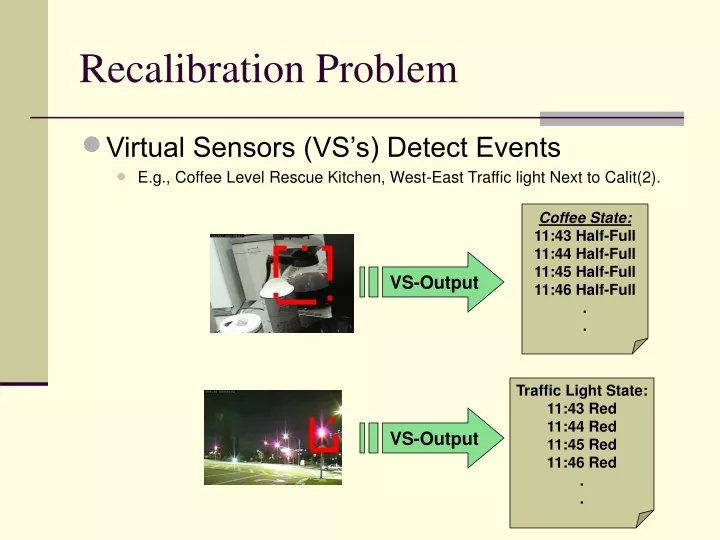
Recalibration Problem • Virtual Sensors (VS’s) Detect Events • E.g., Coffee Level Rescue Kitchen, West-East Traffic light Next to Calit(2). Coffee State: 11:43 Half-Full 11:44 Half-Full 11:45 Half-Full 11:46 Half-Full . . VS-Output Traffic Light State: 11:43 Red 11:44 Red 11:45 Red 11:46 Red . . VS-Output
Recalibration Problem (Cont.) • Perturbations in Physical Sensors Can Cause Virtual Sensors to Become Un-calibrated • E.g, camera can move its FOV. Coffee State: 11:43 Empty 11:44 Empty 11:45 Empty 11:46 Empty . . VS-Output Traffic Light State: 11:43 Orange 11:44 Orange 11:45 Orange 11:46 Orange . . VS-Output
Recalibration Problem (Cont.) • Recalibration refers to detection of such perturbations & adjustment of parameters used by VS’s to detect correctly.
The Recalibration Problem - Approach • Observation: • Events = change in value of attributes. • Approach: • Model the state changes as an automata. • Use the automata to capture semantics.
Exploiting Semantics for Re-Calibration • Detection: • Deviation from the Learnt Model • Correction & Calibration: • A Search Over Parameter Space to Find Semantic Model • DEMO: Finding the Correct FOV Based on System Semantics: Coffee Machine & Traffic Light
Exploiting Semantics for Scheduling of Resources • Let: • C be a Set of n Cameras. • Plan(t)be a {0,1} vector <b1,..,bn> (Indicating Which Cameras to Probe) • Benefit(Plan(t)) be the expected benefit from executing this plan. • Cost(Plan(t)) be the cost associated with that plan. • Find a plan, such that: • Benefit(Plan(t)) is maximized. • Cost(Plan(t)) is minimized. • Under the constraint: Σbi ≤ k • For example, probe a set of N entry/exit sensors: • To find as manydistinct people entering. • When establishing a new connection to a sensor is 5 time more expensivethan continuing to probe the same sensor. • Only k connections can be established at the same time.
Semantics Exploited • Apriority: • What are the cameras that I should probe, when nothing else is known. • Self Correlation: • If we’ve seen someone walking in camera A, how likely is it to see more motion in A. • Cross Correlation: • If this is the state of the system we are aware of: • We’ve seen motion in camera B 5 seconds ago. • And motion in camera C 2 seconds ago. • How likely is it to see motion in camera A.
Motion Semantics • Semantics Used: • Motion • Other Types of Semantics • Trajectory • Identity
Scheduling Using Semantics • Naïve: RR • Exploiting Sensor Semantics: • Determine Probability of Motion • Use the Motion Estimates to Find the Best Plan
Results Almost 90% improvement compared to RR!!
Different Benefit Functions • The semantics based algorithm proves to perform the best. • ..But it can do better if we change the plan based on the cost/benefit functions.