Download
1 / 48
480 likes | 694 Views
Riadený objekt. Korekčný člen. NÁVRH KOREKČNÝCH ČLENOV. Návrh sériového korekčného člena s fázovým predstihom Phase Lead Controller. Prenosová funkcia:. y. w. u. -. Odvodenie vzťahov pre výpočet parametrov korekčného člena. Z frekvenčnej prenosovej funkcie korekčného člena:. Fáza.

E N D
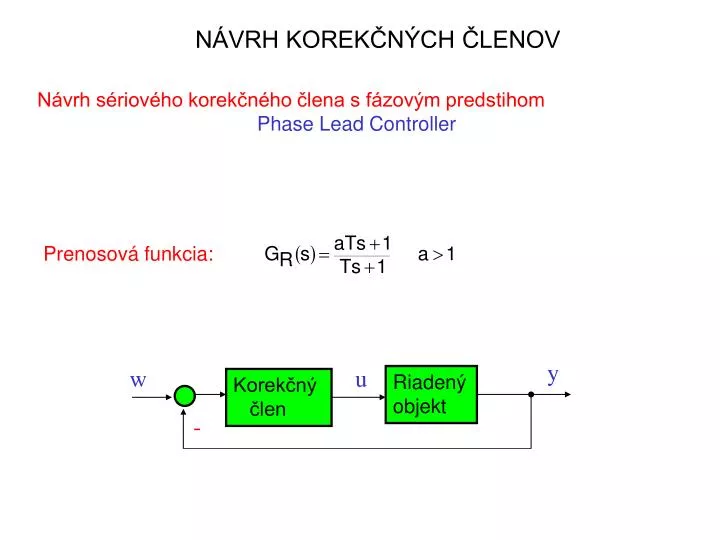
Riadený objekt Korekčný člen NÁVRH KOREKČNÝCH ČLENOV Návrh sériového korekčného člena s fázovým predstihom Phase Lead Controller Prenosová funkcia: y w u -
Odvodenie vzťahov pre výpočet parametrov korekčného člena Z frekvenčnej prenosovej funkcie korekčného člena:
20log a 1/aT 1/T 10log a Frekvenčnécharakteristiky: 20logM [dB] wm fáza [°] fm
jIm{Go(jw)} Re{Go(jw)} -1 K=1 K=100 Go s korekčným členom
Postup návrhu korekčného člena s fázovým predstihom 1.Určíme zosilnenie K otvoreného regulačného obvodu z podmienky pre statickú presnosť 2. Odhadneme požadovanú hodnotu fázovej bezpečnosti Z fázovej charakteristiky a pre vypočítané K odčítame fázovú bezpečnosť. Odhadneme potrebnú hodnotu fázovej bezpečnosti a vypočítame 3. Pre známe fmurčíme parameter a 4.Vypočítame 10 log a a určíme wm Z hodnoty -10 log a v amplitúdovej Bodeho charakteristike určíme wm 5.Určíme časovú konštantu T 6.Analyzujeme vlastnosti regulačného obvodu
Príklad č.4.1Uvažujme riadený systém s prenosovou funkciou Požiadavky: pre skok rýchlosti w max. preregulovanie Riadiaci obvod: Riešenie:
Z Hallových nomogramov určíme požadovanú fázovú bezpečnosť pre maximálne preregulovanie 30%
Amplitúdový priesečník Fázový priesečník 17.18 Potrebné fázové prevýšenie Zaokrúhlime -10log a a = 10 T = 0.01804
Čo prinesie zvýšenie fázovej bezpečnosti?! Zvýšme požadovanú fázovú bezpečnosť na 65 stupňov Posunie sa aj amplitúdový priesečník nakoľko: a teda -10 log 20 = -13 (dB) T = 0.01 s
Príklad č.4.2Uvažujme riadený systém s prenosovou funkciou Požiadavky: pre jednotkový skokw max. preregulovanie Riešenie:
Z Hallových nomogramov určíme požadovanú fázovú bezpečnosť pre maximálne preregulovanie 30%
Potrebné fázové prevýšenie Zaokrúhlime a = 4,6 T = 0,006217
Priklad č.4.3 Uvažujme riadený systém s prenosovou funkciou Požiadavky: pre skok rýchlosti w Riešenie:
K 1) Pre jeden KČ: zaokrúhlime na = 85 a = 12.41 -10loga = -11dB
K 2) Dva rôzne korekčné členy Prvý korekčný člen bude podľa predchádzajúceho návrhu
3) Pre druhý korekčný člen nový návrh -10 log a = -11 dB
5. Návrh sériového korekčného člena s fázovým zaostávaním Prenosová funkcia:
Postup návrhu korekčného člena s fázovým zaostávaním 1. Určíme zosilnenie K z podmienky kvality riadenia v ustálených stavoch 2. Nakreslíme Bodeho charakteristiky pre nekompenzovaný obvod so zosilnením K 3. Pre požadovanú hodnotu fázovej bezpečnosti Df0z v Bodeho diagrame odčítame kruhovú frekvenciu budúceho amplitúdového priesečníka wa
wa bude amplitúdovým priesečníkom (aj s korekčným členom). a tiež platí: 5. Platnosť vzťahu zabezpečíme dostatočným posunutím aplitú- dovej charakteristiky doľava tak, že zlomový bod jej asympto- tickej náhrady si zvolíme o jednu dekádu nižšie, t.j. volíme odtial 6. Nakoniec vykonáme analýzu
Príklad 5.4 Uvažujme riadený objekt s prenosovou funkciou Požiadavky: pre skok rýchlosti Riešenie: 1) 2)
A = 40 dB T = 1176
Návrh korekčného člena s derivačno integračným charakterom
Príklad 5.5: Pre sústavu s prenosovou funkciou navrhnite sériový korekčný člen, ktorý zabezpečí fázovú rezervu väčšiu ako 45° Najskôr navrhnime KČ s fázovým predstihom
a = 20 -10loga = -13 dB
T = 0.008 s Návrh korekčného člena s fázovým zaostávaním
A = 23,7 b = 0.0653 = 30.63
Príklad 4a5.6 Navrhnite korekčný člen s fázovým predstihom a s fázovým oneskorením k zadanému systému. • Úlohou je navrhnúť taký korekčný člen, aby: • trvalá regulačná odchýlka e(¥) pre skok rýchlosti riadiacej veličiny • w(t)=t spĺňala podmienku:e(¥)<0,01 • 2. maximálne preregulovaniebolo menšie ako 30%
1. Z podmienky požadovanej kvality ustálených stavov 1. Z podmienky požadovanej kvality prechodných procesov
V tomto prípade, ako to ukazujú Bodeho charakteristiky, je regulačný obvod nestabilný fázová bezpečnosť je , pre korekciu fázy vychádza Nakoľko žiadame
Často je možné upraviť koreňový súčiniteľ (aTs+1) v čitateli prenosovej funkcie korekčného člena tak, aby sa rovnal niektorému koreňovému súčiniteľu v menovateli prenosovej funkcie riadeného systému. Ich vzájomným krátením znížime rád systému. Za týmto účelom musíme zabezpečiť rovnosť pričom spravidla • buď ponecháme už určenú hodnotu parametra a (tým sa nemení ani hodnota parametre )a upravíme iba časovú konštantu T na hodnotu Podľa vzťahu sa zmení aj
Kompenzujeme v prenosovej funkcii súčiniteľ s časovou konštantou pri zachovaní parametra a=12,57 . Nová hodnota časovej konštanty korekčného člena je Takto upraveným parametrom prislúcha prenosová funkcia korekčného člena:
Ktorá už regulačný obvod stabilizuje, ale fázová bezpečnosť je ešte veľmi malá Kaskádne zapojenie dvoch takýchto korekčných členov s prenosovou funkciou Teraz, už poskytuje požadovanú fázovú bezpečnosť Maximálne preregulovanie pre