Download
1 / 21
230 likes | 522 Views
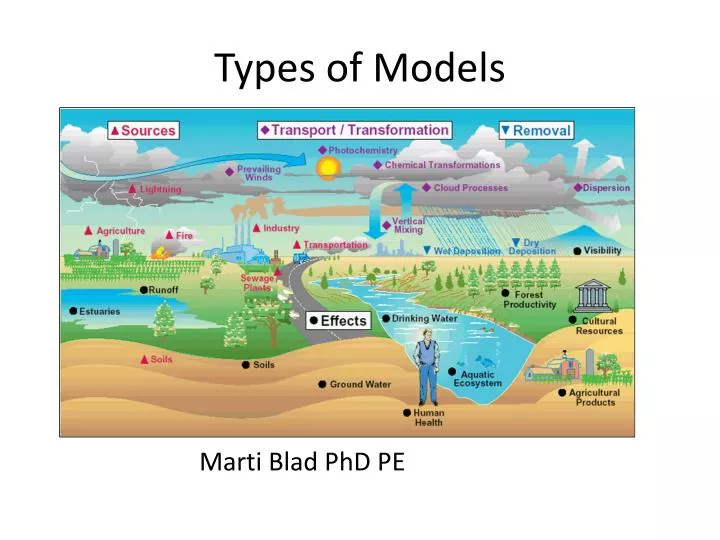
Types of Models. Marti Blad PhD PE. EPA Definitions. Dispersion Models : Estimate pollutants at ground level receptors Photochemical Models : Estimate regional air quality, predicts chemical reactions

E N D
Types of Models Marti Blad PhD PE
EPA Definitions • Dispersion Models: Estimate pollutants at ground level receptors • Photochemical Models: Estimate regional air quality, predicts chemical reactions • Receptor Models: Estimate contribution of multiple sources to receptor location based on multiple measurements at receptor • Screening Models: applied 1st , determines if further modeling needed • Refined Models: req’d for SIP, NSR, and PSD • Regulatory requirement for permits
Models = Representations or pictures • Numerical algorithms • Sets of equations need inputs • Describe = quantify movement • Simplified representation of complex system • Box or Mass Balance • Used to study & understand the complex • Physical, chemical, and spatial, interactions
Types of Models • Gaussian Plume • Analytical approximation of dispersion • more later • Statistical & Stochastic • Based on probability • Recall regression is linear model • Empirical • Based on experimental or field data • Actual numbers • Physical (scale models) • Flow visualization in wind tunnels, etc.
Recall bell shaped curve • Plume dispersion in lateral & horizontal planes characterized by a Gaussian distribution • Normal Distribution • Mu is median • Sigma is spread
Gaussian-Based Dispersion Models • Pollutant concentrations are calculated estimations at receptor • Uncertainty of input data values • Data quality, completeness • Steady state assumption • No change in source emissions over time • Screen3 will be end of the week
Gaussian Dispersion z ¤ Dh = plume rise h = stack height Dh H = effective stack height H = h + Dh H h x C(x,y,z) Downwind at (x,y,z) ? y
Air Pollution Dispersion (cont.) • This assumption allows us to calculate concentrations downwind of source using this equation where c(x,y,z) = contaminant concentration at the specified coordinate [ML-3], x = downwind distance [L], y = crosswind distance [L], z = vertical distance above ground [L], Q = contaminant emission rate [MT-1], sy = lateral dispersion coefficient function [L], sz = vertical dispersion coefficient function [L], u = wind velocity in downwind direction [L T-1], H = effective stack height [L].
Gaussian model picture • Predicted concentration map
The Gaussian Plume Model • The shape of the curve = Bell shaped = Gaussian curve hence the model is called by that name.
Ways to think about math • Gaussian = “normal” curve math • Recall previous distribution picture • Dispersion & diffusion dominates • Eulerian • Assumes uniform concentrations in box • Assumes rapid vertical and horizontal mixing • Plume in a grid • Predicts species concentrations • Multi day scenarios
Eulerian Air Quality Models AKA Plume in Grid Figure from http://irina.colorado.edu/lectures/Lec29.htm
Dimensional Concept Variable is Time: t Variable is Time and height: t, y Variable is Time, height and length distance: t, x, y t, x, y, z
3-Dimensional Models Depth of boxes discussed under meteorology
Other choice: Lagrangian • “Puffs” of pollutants • Trajectory models • Follow the particle Puff W2 W1 S.S. Plume
Lagrangian Air Quality Models From “INTERNATIONAL AIR QUALITY ADVISORY BOARD 1997-1999 PRIORITIES REPORT, the HYSPLIT Model” (http://www.ijc.org/boards/iaqab/pr9799/project.html)
Assumptions & limitations • Physical conditions: Topography • Locations: buildings, source, community, receptor • Appropriate for the averaging time period • Statistics & math • Meteorology • Stack or source emission data • Pollutant emission data • Plume rise, Stack or source specific data • Location of source and receptors
EPA MODELS—Regulatory CALPUFF AERMOD