Download
1 / 31
310 likes | 318 Views
CS614: Time Instead of Timeout. Ken Birman February 6, 2001. What we’re after. A general means for distributed communication Letting n processes coordinate an action such as resource management or even replicating a database. Paper was first to tackle this issue

E N D
CS614: Time Instead of Timeout Ken Birman February 6, 2001
What we’re after • A general means for distributed communication • Letting n processes coordinate an action such as resource management or even replicating a database. • Paper was first to tackle this issue • Includes quite a few ideas, only some of which are adequately elaborated
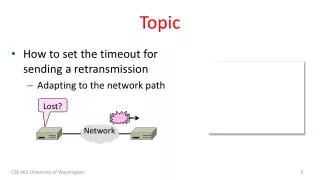
Earlier we saw… • Distributed consensus impossible with even one faulty process. • Impossible to determine if failed or merely “slow”. • Solution 1: Timeouts • Can easily be added to asynchronous algorithms to provide guarantees about slowness. • Assumption: Timeout implies failure.
Asynchronous Synchronous • Start with an asynchronous algorithm that isn’t fault-tolerant • Add timeout to each message receipt • Assumes bounds on the message transmission time and processing time • Exceeding the bound implies failure • Easy to “bullet-proof” a protocol. • Practical if bounds are very conservative
Example: Resource Allocation P I want Resource X Yes / No, In Use Q Timeout = 2δ
Null messages • Notice that if a message doesn’t contain real data, we can sometimes skip sending it • For example: if resource isn’t in use, I could skip sending the reply and after δ time interpret your “inaction” as a NULL message • Lamport is very excited by this option • A system might send billions of NULL messages per second! And do nothing on receiving them!! Billions and billions…
Another Synchronous System • Round Based • Each round characterized by time needed to receive and process all messages.
Lamport’s version: • Use Physical Clocks • Also fault-tolerant realtime atomic broadcast • Assumptions about time lead to conclusions other than failure • Passage of time can also have “positive” value • Provides generality for distributed computing problems • State machines • Resource acquisition and locking • Expense?
Assumptions • Bounded message delay δ • Requires bandwidth guarantees. • A message delayed by > δ treated as failure. • Clock Synchronization • Clock times differ by less than ε. • Use clock synchronization algorithms (could be costly; revisit in next lecture). • Any process can determine message origin (e.g. using HMAC signatures) • Network cannot be partitioned
An Algorithm… If send message queue not empty Send m with timestamp Ti If receive message queue not empty If queue contains exactly one message m from j with timestamp Ti - (δ + ε) Then Received Message = m Else Received Message = NULL • Implies Δ = (δ + ε)
Example Ti Ti+Δ i Message M Tj Tj+Δ j Tj’ Tj’+Δ j’ ε
More • This can be expressed more elegantly as a broadcast algorithm (more later). • Can inductively extend definition to allow for “routing” across path of length n • Δ = (n·δ + ε) • To tolerate f failstop failures, will need f + 1 disjoint paths. • To tolerate f Byzantine Failures, will need 2·f + 1 disjoint paths. • Transmitting NULL message easy: do nothing.
Even More • For good guarantees, need close synchronization. • Message arrives Tmessage- ε, …, Tmessage + δ + ε • Thus, need to wait (δ + ε).
Synchronization required? • A means to reliably broadcast to all other processes. • For process P broadcasting message M at time Tp, every (correct) process must receive the message at time Tp + Δ • For correct j, j’, receive by Tj + Δ and Tj’ + Δ, respectively, or neither does.
= Atomic Broadcast • Atomicity • All correct processors receives same message. • Same order • All messages delivered in same order to all processors. • Termination • All updates delivered by T + Δ.
Lamport’s Assumption • Somebody implements Atomic Broadcast black box. • Next slide summarizes options • Lamport briefly explains that previous point to point algorithm is strong enough. • Only assumes ability to send along a path correctly.
Atomic Broadcast: [CASD]* • Describes 3 atomic broadcast algorithms. • All based on Diffusion (Flooding) • Varying degrees of protection • 1. Tolerant of omission failures • Δ = πδ + dδ + ε • 2. Works in presence of Clock Failures • Δ = π(δ+ ε )+ dδ + ε • 3. Works in presence of Byzantine Failures • Δ = π(δ+ ε )+ dδ + ε • δ much larger than previous for message authentication * F. Cristian, H. Aghali, R. Strong and D. Dolev, "Atomic Broadcast: From Simple Message Diffusion to Byzantine Agreement", in Proc. 15th Int. Symp. on Fault-Tolerant Computing. June 1985.
State Machine • General model for computation (State Machine = Computer!) • Describe computation in terms of state + transformations on the state
State Machines • Multiple replicas in lock-step • Number of replicas bounded (below) by fault-tolerance objectives • Failstop model • Failover, > f + 1 replicas • Byzantine model • Voting, > 2·f + 1 replicas
State Machine:Implementation • Let CLOCK = current time While ( TRUE ) Execute MessageCLOCK – Δ Execute Local Processing(CLOCK) Generate and Send MessageCLOCK • If there exist multiple messages with same time stamp, create an ordering based on sending process.
State Machine (Cont.) • If we use our broadcast algorithm, all processes will get message by Tsender + Δ • Using the sending process id to break ties ensures everyone executes messages in same order.
State Machines for Distributed Applications • Resource allocation • All processes maintain list of which process has resource “locked”. • Lock expires after Δ’ seconds • Requests for resource are broadcast to all • Rules govern who is granted lock (followed by all correct processes) • Ensure no starvation • Maintain consistency of resource locking
Example: Resource Allocation Ti i Request R’ Request R Tj j Request R Tj’ j’ Wait Time: Δ
Comparison • No explicit acknowledgement needed • Would be needed in traditional asynchronous algorithm • But here, requesting process knows that any conflicting request would arrive within T + Δ window.
Key: • Non-occurrence of event (non-request) tells us of info: we can safely lock the resource! • Cost is the delay, as message sits in “holding pen.” • Concern about scalability in n: • We always see n requests in each time period, so will grow in n. Not addressed • Must bound request processing time so that all can be satisfied (else could starve process with higher id hence lower priority)
Timeout Max Delay: 2·δ Average Delay: 2·δexp Messages: n + dependent on failure mode Time [Lamport] Max Delay: Δ = δ + ε Average Delay: Δ = δ + ε Messages: dependent on failure mode l More on Comparison: Resource Allocation • But is request processing time the “real” issue?
Characterizing ε • ε proportional to δvar • Low level algorithms can achieve good clock synchronization. • δvar small for low-level algorithms • δvar large for high-level algorithms • Variance added by traversing low levels of protocol stack
Summary… • Expressing application as state machine transitions can easily be transferred to distributed algorithm. • Event based implementation can be easily created from transitions.
Other State Machine uses • Distributed Semaphores • Transaction Commit • State Machine synchronization core on top of distributed apps. • Entire application need not be distributed state machine.
Ideas in this paper • Coordination and passing of time modeled as synchronous execution of steps of a state machine • Absence of a message becomes NULL message after delay Δ • Notion of dynamic membership (vague) • Broadcast to drive state machine (vague) • State transfer for restart (vague) • Scalability in n (not addressed) • Fault-tol. (ignores application semantics) • Δ-T behavior (real-time mechanism)
Discussion • How far can we take the state machine model? • Can it be made to scale well? • Extreme clock synchronization dependence, practical? Worth it? • Possibly large waiting time for each message, dependent upon worst case message delivery latency