Download
1 / 12
120 likes | 234 Views
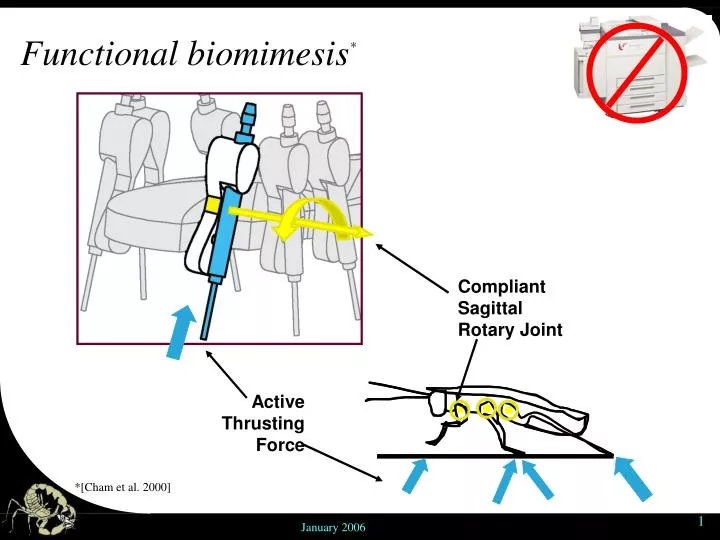
Functional biomimesis *. Compliant Sagittal Rotary Joint. Active Thrusting Force. *[Cham et al. 2000]. viscoelastic material. stiff material. Example: mapping from passive mechanical properties of insects to biomimetic robot structures.

E N D
Functional biomimesis* Compliant Sagittal Rotary Joint Active Thrusting Force *[Cham et al. 2000] January 2006
viscoelasticmaterial stiff material Example:mapping from passive mechanical properties of insects to biomimetic robot structures Study biological materials, components, and their roles in locomotion. Study Shape Deposition Manufacturing (SDM) materials and components. Models of material behavior and design rules for creating SDM structures with desired properties January 2006
Hysteresis loop @10Hz Example:mapping from passive mechanical properties of insects to biomimetic robot structures Study biological materials, components, and their roles in locomotion. Study Shape Deposition Manufacturing (SDM) materials and components. 6 Data Model 4 2 0 Force (mN) -2 -4 -6 -0.5 -0.4 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 0.4 0.5 position (mm) Models of material behavior and design rules for creating SDM structures with desired properties January 2006
uphill downhill Self-tuning is needed to adapt to changes Velocity versus slope for different stride frequencies 24 deg. 60 Sprawlita running on sloped track Frequency = 11 Hz 40 Velocity (cm/s) 20 Frequency = 5 Hz 0 -10 0 10 20 slope January 2006
Biological approach • Passive mechanical system and predominantly feed-forward control allow animal to run over rough terrain. • “Preflexes,” augmented by reflexes and adaptation, account for changes in system and environmental conditions. • The approach overcomes limitations of slow neural pathways, imperfect sensing, etc. Task Adaptation FF model model Feed-Forward control Learning Reflex control Command signal Mechanical system preflex Environment Sensory feedback January 2006
Adaptationmodel Contact Sensor • No encoders, gyros, tachometers... • No tedious calibration • No fancy filtering • No sophisticated closed-loop control. Adaptation in small biomimetic robots • Use preflexes and open-loop motor control for robust, stable locomotion. • Use simple, inexpensive sensors to detect changes in operating conditions. • Use adaptation to tune the parameters of the open-loop system. Feed-forward activation patternand timing tripods Command input time Mechanical system (actuators, limbs) preflexes Environment Locomotion Passivestabilization January 2006
Ton T maximize: Thrust timing for max. height y Contact Time Ground Reaction Force Height Thrust Time y ttd tc tf tl January 2006
2 2 1 1 3 3 Effect of periodfor “long thrust” hopping -3 x 10 2.5 Hop Height Natural period: tn = 0.21 sec Thrust magnitude: F/mg = 1.50 Damping: z = 0.20 2 1.5 1 0.5 0.15 0.2 0.25 0.3 0.35 0.4 Multiple Solutions 1 0.8 Eigenvalues 0.6 0.4 0.2 “normal” 0.15 0.2 0.25 0.3 0.35 0.4 unstable period-1 0 Velocity atactuation -0.5 hop-settle-fire -1 0.15 0.2 0.25 0.3 0.35 0.4 Period (ms) January 2006
Conclusions from 1 DOF model: • Maximum hop height occurs if thrust is initiated near maximum compression • Stability requires thrust initiation before max. compression. • For long thrust (vs natural period) thrust should begin before max. compression and end essentially at liftoff. • Therefore, measuring the interval between thrust deactivation and liftoff is a good indicator of whether the stride period is tuned correctly. January 2006
Lag (Td - Tl) 50 0 100 140 180 220 260 300 Period (ms) Adaptation algorithm Dtn+1 = Ki - Kp(Td - Tl + Tv) Td Deactivation Time Tl Loss of Contact “Drift” Trying to reduce activation frequency Tv Const. offset between deactivation and lift-off times ON piston activation foot contact OFF 0 20 40 60 80 100 120 140 160 180 200 time(ms) Gait Period January 2006
Slope adaptation demonstration January 2006
Hopping with variable stiffness (1) (2) fn = sqrt(k/m)/(2*pi) (3) Discussion: Blue curve shows typical results when maximum stroke length is constrained.Maximum period-1 hop height (1) is followed by range of non-period-1 hops (2) and then bylow amplitude, stable period-1 behavior (3). At frequencies below (1) hopping reverts to “hop-settle-fire.” J. Karpick 08MAR06 January 2006