Download
1 / 25
250 likes | 410 Views
CNR-ISIB, CNR-IEIIT. POLIMI-DEI, INFM–UDR-MI. CONTACT-LESS 3D COORDINATE MEASUREMENT SYSTEM BY LASER SCANNING AND IMAGE RECONSTRUCTION FROM UNORGANIZED DATA Gabriella Tognola (1) Cesare Svelto (2) Marta Parazzini (1) Paolo Ravazzani (1) Ferdinando Grandori (1)

E N D
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI CONTACT-LESS 3D COORDINATE MEASUREMENT SYSTEM BY LASER SCANNING AND IMAGE RECONSTRUCTION FROM UNORGANIZED DATA Gabriella Tognola(1) Cesare Svelto(2) Marta Parazzini(1) Paolo Ravazzani(1) Ferdinando Grandori(1) (1)CNR Institute of Biomedical Engineering, Milan, Italy (2) Politecnico di Milano, Dipartimento di Elettronica e Informazione, CNR-IEIIT, and INFM–UDR-MI, Milano, Italy
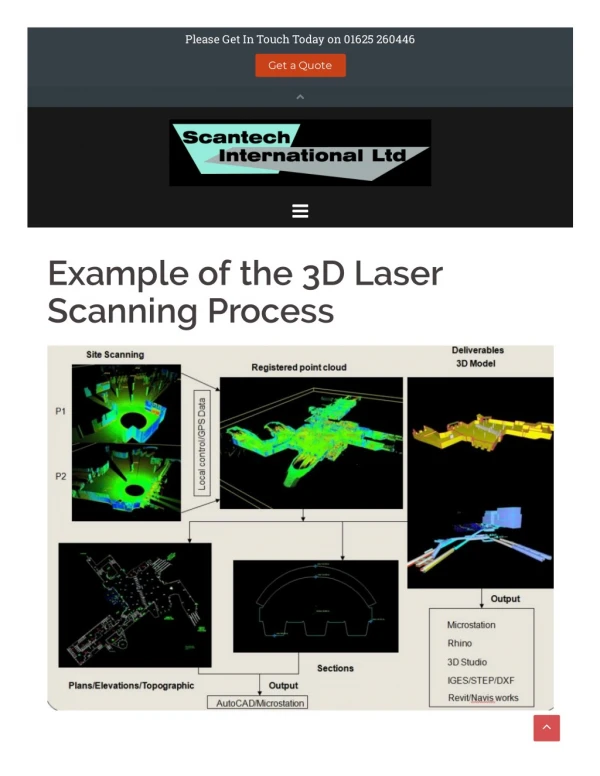
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI AIMS • Digitization of an object surface by laser scanning • Reconstruction of the explicit model for the object surface • Evaluation of system accuracy
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI The proposed architecture
xxx CCD camera Object Laser CCD camera CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI 3D scanning Laser: He-Ne, Melles Griot mod. 05LHP121, class IIIa, with 2 mW at 633 nm on a 600µm spot (diameter) CCD cameras: Qualysis mod.170-002 ver.5.0, 604(H)x294(V)
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Measurement of the 2D position of the laser spot Make the picture black, except for the light spot Electronic shutter Variable gain Scan the picture to detect the transitions between dark and light Determine the 2D position of the supra-threshold pixels
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Registration process: from 2D to 3D LASER SPOT CCD CAMERA CCD CAMERA By classical triangulation procedure (x1,y1)+(x2,y2) (x,y,z)
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Object and data cloud
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Model reconstruction – Phase one Icosahedron within the range data “Balloon inflating fashion”
From the original data cloud to geometric model after its uniform re-sampling and maximum expansion CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Model reconstruction – End of phase one
From the uniformly-sampled geometric model (PHASE 1) … … to the locally re-sampled model (PHASE 2) CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Model reconstruction – Phase two
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Model reconstruction – Phase three Mesh smoothing with the Taubin’s filter (1995) • Two steps filter: • gaussian filter scaled by (>0) • gaussian filter scaled by (<0) • to reduce shrinking effect and determine the low-pass frequency kLP:
range data wireframe solid CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Result (human heart model) object
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Metrological validation of the acquisition system • Tests made on objects of known geometry and dimensions • Spatial resolution: 9.33 mm • Acquisition noise: 170 mm
Difference Ri-RLS CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Measurement of a reference solid (sphere) - acquisition noise - RLS = 29.491 mm DRrms = 0.162 mm ERR%= 0.55 %
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Measurement of a reference solid (sphere) - acquisition & reconstruction noise - DRrms = 0.094 mm ERR%= 0.32 %
original (analytical) original (noisy) reconstructed surface CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Reconstruction of a reference synthetic ear impression
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI Estimation of reconstruction accuracy Typical acquisition noise: 170mm Reconstruction error floor: 80mm
Obtain the impression of the subject ear canal using a malleable impression material CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI The current earmold manufacturing process (I) 1st PHASE
Obtain a negative image of the ear impression of the previous 1st PHASE CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI The current earmold manufacturing process (II) 2nd PHASE
Obtain the final silicon cast earmold from the image of previous phase Final earmold CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI The current earmold manufacturing process (III) 3rd PHASE
The final silicon earmold IS NOT an exact replica of the subject ear canal User discomfort Susceptibility to acoustic feedback CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI LIMITS OF THE CURRENT PROCESS • The post-processing (positive + negative images) changes the shape and dimension of the final earmold
EAR IMPRESSION LASER SCANNING SURF. RECONSTR. CAD/CAM CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI THE PROPOSED APPROACH Production of the final earmold directly from the original ear impression
CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI EXAMPLES
b) a) CNR-ISIB, CNR-IEIIT POLIMI-DEI, INFM–UDR-MI c) d) ORTHODONTIC APPLICATION Before alignment After alignment
CNR-ISIB POLIMI-DEI, CNR-IEIIT, INFM–UDR-MI Conclusion • Simple and effective laser scanner • Original reconstruction algorithm from unorganized data range • Acquisition system resolution of 9.33mm • Acquisition system noise of 170mm • Total accuracy (acquisition + reconstruction): 100 mm • Earmolds can be produced directly from the ‘digitized’ version of the ear impression • Digital storage of the ear impression allows simple and reliable copy or transmission of the model