Download
1 / 18
180 likes | 364 Views
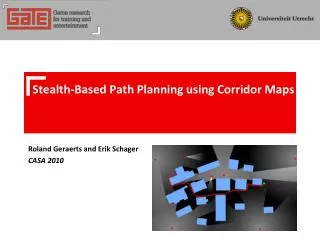
Using the Corridor Map Method for Path Planning for a Large Number of Characters. Roland Geraerts, Arno Kamphuis, Ioannis Karamouzas, Mark Overmars MIG’08. Do We Need a New Path Planning Algorithm?. Goals. Fast and flexible path planner Real-time planning for thousands of characters

E N D
Using the Corridor Map Method for Path Planning for a Large Number of Characters Roland Geraerts, Arno Kamphuis, Ioannis Karamouzas, Mark Overmars MIG’08
Goals • Fast and flexible path planner • Real-time planning for thousands of characters • Dealing with local hazards • Natural paths • Smooth • Short • Keeps some distance to obstacles • Avoids other characters • …
Outline • Corridor Map Method • Path variation • Obstacle avoidance • Crowd simulation • Coherent groups • Conclusions & future work
The Corridor Map Method • Construction phase (off-line) • Create a system of collision-free corridors for the static obstacles • Extract the Generalized Voronoi Diagram • If a path exists, then it can be found • All cycles are included • Corridors have maximum clearance Sampled GVD Corridor Map: GVD + clearance info
The Corridor Map Method • Construction phase (off-line) McKenna MOUT environment Footprint and Corridor Map: 0.05s
The Corridor Map Method • Construction phase (off-line) City environment Footprint and Corridor Map: 0.64s
The Corridor Map Method • Query phase (on-line) • Extract corridor for given start and goal provides global route • The characters follows an attraction point provides local route • Runs along backbone path toward goal • Used to define a force function, applied to the character • Path is obtained by integration over time while updating the velocity, position, and attraction point of the character • Yields a smooth (C1-continuous) path • Other behavior: locally adjust path by adding forces Query points Corridor andbackbone path Path
The Corridor Map Method • Query phase (on-line) McKenna MOUT environment Corridor and path: 0.2ms (average)
The Corridor Map Method • Query phase (on-line) City environment Corridor and path: 1.2ms (average)
Path Variation • Alternative paths for a character • Provides a less predictable opponent (in a game) • May enhance the realism of the gaming experience • Approach • Add a random force (bias) to the character • Control the direction of the bias by e.g. Perlin Noise 100 random paths Lane formation Shorter path
Obstacle Avoidance • Helbing and Molnar’s social force model; forces: • Acceleration toward the desired velocity of motion • Repulsive forces from other characters and borders to keep some clearance • Attractive forces among characters • We need efficient nearest neighbor computations • 2D grid storing the characters
Crowd Simulation • Goal oriented behavior • Each character has its own long term goal • A start and goal fixes a corridor • When a character has reached its goal, a new goal will be chosen • Wandering behavior • Each character makes local decisions • Each character follows its attraction point • When the attraction point reaches a vertex in the corridor map, one of the outgoing edges is selected
Crowd Simulation • Goal oriented behavior • Forces: standard force, biasing force, collision avoidance force
Crowd Simulation • Goal oriented behavior • Forces: standard force, biasing force, collision avoidance force
Coherent Groups • In a coherent group, characters stay close to each other • Group coherence is obtained by limiting • The width of the corridor • The extent along the corridor where the characters can move Large width and area Small width, large area Small width and area
Conclusions • The Corridor Map Method is fast • ~10,000 characters can be simulated in real-time • The Corridor Map Method is flexible • Path variation • Collision avoidance • Crowds • Coherent groups • The Corridor Map Method produces natural paths • Smooth • Short • Keeps some distance to obstacles • …