Download
1 / 14
140 likes | 171 Views
Enhancing Corridor Maps for Real-Time Path Planning in Virtual Environments. Roland Geraerts and Mark Overmars CASA’08. Criteria. Fast and flexible path planner Real-time planning for thousands of characters Dealing with local hazards Natural paths Smooth Short

E N D
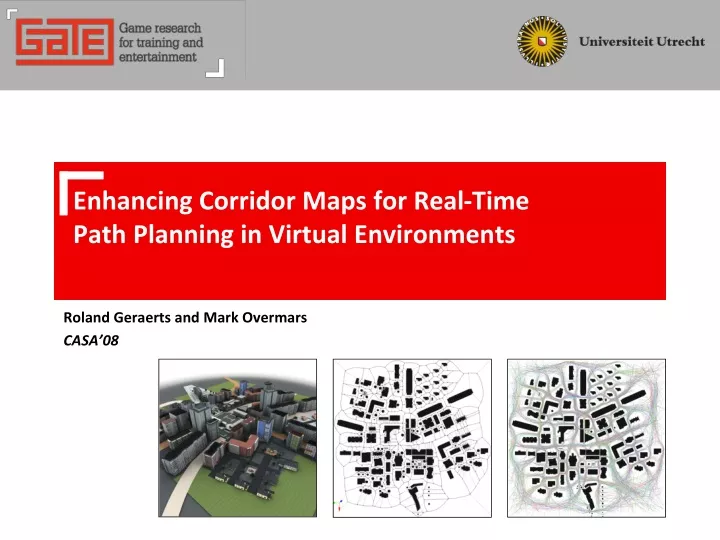
Enhancing Corridor Maps for Real-Time Path Planning in Virtual Environments Roland Geraerts and Mark Overmars CASA’08
Criteria • Fast and flexible path planner • Real-time planning for thousands of characters • Dealing with local hazards • Natural paths • Smooth • Short • Keeps some distance to obstacles • Avoids other characters • …
The CMM – Construction phase • The Corridor Map • A system of collision-free corridors for the static obstacles • Corridor: sequence of maximum clearance disks • Data structure: generalized VD + clearance + additional info Corridor map Corridor
The CMM – Construction phase • Computing the GVD • Draw distance mesh for each obstacle with GPU • Parallel projection of meshes • Trace boundaries • Prune the graph • Re-sampling • Increases efficiency • Adding data • Identify connected components • For each corridor, store maximum clearance a character can have
Experiments – Construction phase McKenna MOUT environment Footprint and Corridor Map: 0.05s
Experiments – Construction phase City environment Footprint and Corridor Map: 0.64s
The CMM – Query phase • Extract corridor for start and goal global route • Character follows attraction point local route • Runs along backbone path toward goal • Used to define a force function, applied to character • Obtain path • Integration over time, update velocity/position/attraction point • Yields a smooth (C1-continuous) path • Other behavior: locally adjust path by adding forces Query points Corridor+backbone Path
The CMM – Query phase • For start/goal, find closest disk enclosing the character • kd-tree • Find the shortest backbone path • Dijkstra versus A* • Compute the corridor • Compute the path • Verlet integration Query points Corridor+backbone Path
Experiments – Query phase McKenna MOUT environment Corridor and path: 0.2ms (average)
Experiments – Query phase City environment Corridor and path: 1.2ms (average)
Crowd Simulation • Goal oriented behavior • Each character has its own long term goal • A start and goal fixes a corridor • When a character has reached its goal, a new goal will be chosen • Obstacle avoidance • Helbing and Molnar’s social force model • Efficient nearest neighbor computations • 2D grid storing the characters
Crowd Simulation – Experiments • Performance (1 cpu)
Crowd Simulation • Example
Conclusions • The Corridor Map Method is fast • ~10,000 characters can be simulated in real-time • The Corridor Map Method is flexible • Collision avoidance • Crowds • The Corridor Map Method produces natural paths • Smooth • Short • Keeps some distance to obstacles • …