Download
1 / 20
390 likes | 1.33k Views
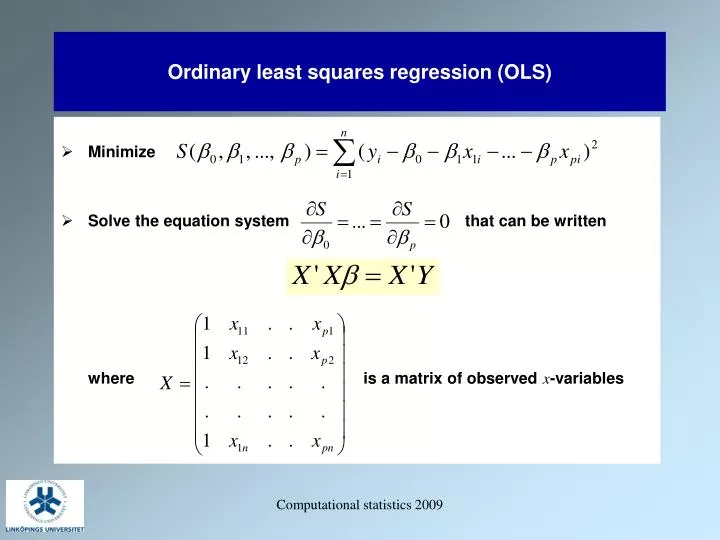
Ordinary least squares regression (OLS). Minimize Solve the equation system that can be written where is a matrix of observed x -variables. Ridge regression. Minimize

E N D
Ordinary least squares regression (OLS) • Minimize • Solve the equation system that can be written where is a matrix of observed x-variables Computational statistics 2009
Ridge regression • Minimize where is a given shrinkage factor • Solve the equation system that can be written where is a matrix of standardized x-variables Computational statistics 2009
Smoothing a time series of observations • Minimize where is a given smoothing factor • Solve the equation system i.e. solve an equation system with n unknowns and n equations Computational statistics 2009
Smoothing a time series of observations • Solve the equation system Computational statistics 2009
Smoothing a time series of observations • Solve the equation system where A is symmetric and Computational statistics 2009
Gauss elimination Consider the equation system where A is a square nonsingular matrix Set Form and continue to eliminate variables one by one Computational statistics 2009
LU-decomposition • Any non-singular matrix can be decomposed into a product of an upper triangular matrix U and a lower triangular matrix L with ones on the diagonal • We can then solve the equation system by first solving and then Computational statistics 2009
LU-decomposition • The number of additions/multiplications needed for an LU-decomposition is approximately p3 • The numerical stability of LU-decomposition can be increased by pivoting the rows of the coefficient matrix Computational statistics 2009
Choleski decomposition • Any positive definite symmetric matrix A can be uniquely decomposed into a product where U is an upper triangular matrix with positive diagonal elements • We can then solve the equation system by first solving and then Computational statistics 2009
Fitting a single regression model to data • The matrix X’X is always symmetric and it is positive definite provided that rank(X) = p • Use Cholesky decomposition for fitting a single regression model to data Computational statistics 2009
Stepwise regression and the sweep operator • Consider the augmented matrix • Sequentially apply the sweep operator to this matrix. • This yields the least squares estimates and residual sum of squares corresponding to models with just the first k covariates included, k = 1, …,p. • It is easy to update the fit for adding or deleting a covariate. Computational statistics 2009
Fitting a ridge regression model to data • The introduction of a shrinkage factor has two effects: • The numerical stability of the equation system is higher than that of the OLS system • The variance of the obtained predictor is reduced Computational statistics 2009
Smoothing a time series of observations • The equation system set up to minimize has a coefficient matrix that is a symmetric, positive definite band matrix • The upper triangular matrix in the Cholesky decomposition is also a band matrix • The number of operations needed is O(n) • The smoothing conditions can be tailored to the application Computational statistics 2009
Smoothing of time series of data collected over several seasons Sequential smoothing over seasons Smoothing over years Computational statistics 2009
Smoothing of time series of data representing several sectors Circular smoothing over sectors Temporal smoothing over years Computational statistics 2009
Regression using QR-decomposition of the X matrix • Assume that the X-matrix has full rank p • For any n x n orthogonal matrix Q • Find a Q so that where R is an upper triangular matrix • The least squares solution is then given by where Q1 contains the first p columns of Q Computational statistics 2009
Calculation of sample variances • Algorithm 1: • Formula 2: • Are the two algorithms numerically equivalent? Computational statistics 2009
Least squares regression with constants • Reparameterize the regression model to • This often gives a much better conditioned problem • If the first column of the X-matrix is constant, QR-factorization automatically transforms the problem in this manner. Computational statistics 2009
Singular value decomposition • The singular value decomposition (SVD) of an nxp matrix X with n p is of the form where U is an orthonormal nxp matrix (U’U = Ip), D is a diagonal matrix with elements d1 d2 … dp 0, and V is a pxp orthonormal matrix (V’V = Ip) • Normally, SVD provides stable solutions of linear regression problems • In addition, the columns of UD and the singular values d1,d2 ,…, dp 0 have interesting statistical interpretations Computational statistics 2009
Statistical interpretation of SVD components • The principal components of a set of data in Rp provide a sequence of best linear approximations to that data, of all ranks q p • The directions of the extracted vectors are given by v1, …, vp • The coordinates of the data points in the new coordinate system are given by the columns of UD • In addition, • The linear combination Xv1 has the highest variance of all linear combinations of the features for which v1 has length 1. • The linear combination Xv2 has the highest variance of all linear combinations of the features for which v2 has length 1 and is orthogonal to v1. • … Computational statistics 2009