Download
1 / 1
10 likes | 130 Views
U N M A N N E D. A E R I A L. V E H I C L E. Introduction. Approach and Considerations. Limitations. Assumptions. Intended Users and Uses. Problem Statement. Operating Environment. Closing Summary. Estimated Resources. Project Schedule. Project Requirements. Expected End Product.

E N D
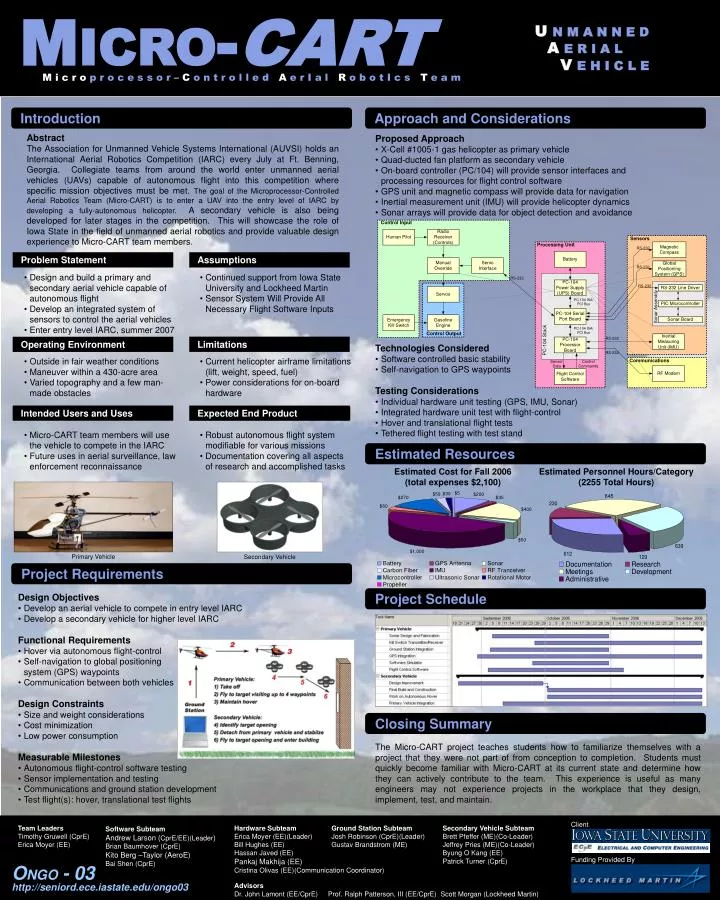
U N M A N N E D A E R I A L V E H I C L E Introduction Approach and Considerations Limitations Assumptions Intended Users and Uses Problem Statement Operating Environment Closing Summary Estimated Resources Project Schedule Project Requirements Expected End Product MICRO-CART M i c r o p r o c e s s o r – C o n t r o l l e dA e r I a lR o b o t I c sTe a m Abstract The Association for Unmanned Vehicle Systems International (AUVSI) holds an International Aerial Robotics Competition (IARC) every July at Ft. Benning, Georgia. Collegiate teams from around the world enter unmanned aerial vehicles (UAVs) capable of autonomous flight into this competition where specific mission objectives must be met. The goal of the Microprocessor-Controlled Aerial Robotics Team (Micro-CART) is to enter a UAV into the entry level of IARC by developing a fully-autonomous helicopter. A secondary vehicle is also being developed for later stages in the competition. This will showcase the role of Iowa State in the field of unmanned aerial robotics and provide valuable design experience to Micro-CART team members. • Proposed Approach • X-Cell #1005-1 gas helicopter as primary vehicle • Quad-ducted fan platform as secondary vehicle • On-board controller (PC/104) will provide sensor interfaces and processing resources for flight control software • GPS unit and magnetic compass will provide data for navigation • Inertial measurement unit (IMU) will provide helicopter dynamics • Sonar arrays will provide data for object detection and avoidance • Technologies Considered • Software controlled basic stability • Self-navigation to GPS waypoints • Testing Considerations • Individual hardware unit testing (GPS, IMU, Sonar) • Integrated hardware unit test with flight-control • Hover and translational flight tests • Tethered flight testing with test stand • Design and build a primary and secondary aerial vehicle capable of autonomous flight • Develop an integrated system of sensors to control the aerial vehicles • Enter entry level IARC, summer 2007 • Outside in fair weather conditions • Maneuver within a 430-acre area • Varied topography and a few man-made obstacles • Micro-CART team members will use the vehicle to compete in the IARC • Future uses in aerial surveillance, law enforcement reconnaissance • Continued support from Iowa State University and Lockheed Martin • Sensor System Will Provide All Necessary Flight Software Inputs • Current helicopter airframe limitations (lift, weight, speed, fuel) • Power considerations for on-board hardware • Robust autonomous flight system modifiable for various missions • Documentation covering all aspects of research and accomplished tasks Estimated Cost for Fall 2006 (total expenses $2,100) Estimated Personnel Hours/Category (2255 Total Hours) Primary Vehicle Secondary Vehicle • Design Objectives • Develop an aerial vehicle to compete in entry level IARC • Develop a secondary vehicle for higher level IARC • Functional Requirements • Hover via autonomous flight-control • Self-navigation to global positioning system (GPS) waypoints • Communication between both vehicles • Design Constraints • Size and weight considerations • Cost minimization • Low power consumption • Measurable Milestones • Autonomous flight-control software testing • Sensor implementation and testing • Communications and ground station development • Test flight(s): hover, translational test flights Closing Summary The Micro-CART project teaches students how to familiarize themselves with a project that they were not part of from conception to completion. Students must quickly become familiar with Micro-CART at its current state and determine how they can actively contribute to the team. This experience is useful as many engineers may not experience projects in the workplace that they design, implement, test, and maintain. Client Team Leaders Timothy Gruwell (CprE) Erica Moyer (EE) Hardware Subteam Erica Moyer (EE)(Leader) Bill Hughes (EE) Hassan Javed (EE) Pankaj Makhija (EE) Cristina Olivas (EE)(Communication Coordinator) Ground Station Subteam Josh Robinson (CprE)(Leader) Gustav Brandstrom (ME) Secondary Vehicle Subteam Brett Pfeffer (ME)(Co-Leader) Jeffrey Pries (ME)(Co-Leader) Byung O Kang (EE) Patrick Turner (CprE) Software Subteam Andrew Larson (CprE/EE)(Leader) Brian Baumhover (CprE) Kito Berg –Taylor (AeroE) Bai Shen (CprE) Funding Provided By ONGO- 03 http://seniord.ece.iastate.edu/ongo03 Advisors Dr. John Lamont (EE/CprE) Prof. Ralph Patterson, III (EE/CprE) Scott Morgan (Lockheed Martin)