Download
1 / 7
70 likes | 88 Views
Explore the Maximum Likelihood Ensemble Filter (MLEF) approach for estimating state variables in non-linear dynamic models. Learn about analysis and forecast error covariance, assimilation algorithms, and optimization techniques. Discover various model options, observation types, and solution estimators.

E N D
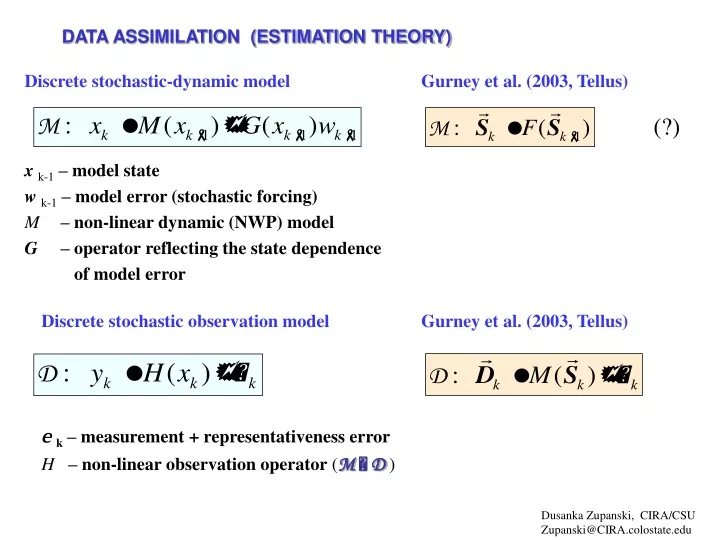
DATA ASSIMILATION (ESTIMATION THEORY) Discrete stochastic-dynamic model Gurney et al. (2003, Tellus) (?) xk-1 – model state wk-1 – model error (stochastic forcing) M – non-linear dynamic (NWP) model G – operator reflecting the state dependence of model error Discrete stochastic observation model Gurney et al. (2003, Tellus) ek – measurement + representativeness error H – non-linear observation operator (M D ) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF APPROACH Minimize cost function J Change of variable - model state vector of dim Nstate >>Nens - control vector in ensemble space of dim Nens Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF APPROACH (continued) Analysis error covariance In Gurney et al. (2003) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF APPROACH (continued) Forecast error covariance In standard Kalman filter Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF Algorithm prep_ensda.sh WARM start: Copy files from previously completed cycle COLD start: Run randomly-perturbed ensemble forecasts to initialize fcst err cov cycle_ensda.sh icycle < N_cycles_max fcsterr_cov.sh - Prepare first-guess (background) vector - Prepare forecast error covariance (from ensembles) prep_obs.sh Given ‘OBSTYPE’ and ‘delobs’, select and copy available obs files assimilation.sh Iterative minimization of cost function, save current cycle output Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF Algorithm assimilation.sh script assimilation.sh iter < ioutmax forward.sh: Transformation from model space to observation space Hessian preconditioning (only for iter=1) Gradient calculation (ensembles) Cost function calculation (diagnostic) Minimization (ensemble subspace) Step-length (line-search) Control variable update (transformation from ensemble subspace to model (physical) space) - Analysis error covariance calculation - Save current cycle output files - Post-processing (chi-square, RMS, etc.) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
MLEF Algorithm Options Models: KdVB, GEOS, SWM, RAMS, T3 … Observations: Synthetic or include various real observations Obs. operators: Include various forward operators Solution Type: Mode (max likelihood-MLEF) or Mean (ensemble mean ETKF) Estimator: Filter or Smoother Control variable: Initial conditions, Model bias, Model parameters Covariances: Localized, or Non-localized forecast error covariance Minimization: Minimization algorithm (C-G, L-BFGS) MPI: ParallelMPI run or a Single processor run Verifications: Innovation statistics (chi-square test, K-S test), RMS-errors Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu