Download
1 / 24
240 likes | 363 Views
MODEL ERROR ESTIMATION EMPLOYING DATA ASSIMILATION METHODOLOGIES Dusanka Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University Fort Collins, CO 80523-1375. ATS Colloquium series 29 January 2004. ftp://ftp.cira.colostate.edu/Zupanski/presentations.

E N D
MODEL ERROR ESTIMATION EMPLOYING DATA ASSIMILATION METHODOLOGIES Dusanka Zupanski Cooperative Institute for Research in the Atmosphere Colorado State UniversityFort Collins, CO 80523-1375 ATS Colloquium series 29 January 2004 ftp://ftp.cira.colostate.edu/Zupanski/presentations ftp://ftp.cira.colostate.edu/Zupanski/manuscripts
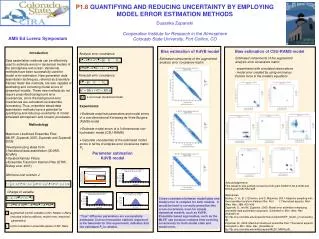
OUTLINE: • Data assimilation methods • State augmentation approach • Model error estimation employing variational and EnsDA frameworks • Experimental results employing various models Q: What is data assimilation? • Conclusions and future work Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
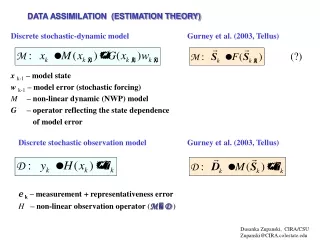
DATA ASSIMILATION (ESTIMATION THEORY) Discrete stochastic-dynamic model wk-1 – model error (stochastic forcing) M – non-linear dynamic (NWP) model G – model (matrix) reflecting the state dependence of model error Discrete stochastic observation model ek – measurement + representativeness error H – non-linear observation operator (M D ) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
DATA ASSIMILATION INCLUDES THE FOLLOWING: (1) State estimate (optimal solution): VARIATIONAL APPROACH KALMAN FILTER APPROACH (2) Estimate of the uncertainty of the solution: KALMAN FILTER APPROACH ENSEMBLE KALMAN FILTER or EnsDA APPROACH In EnsDA solution is defined in ensemble subspace (reduced rank problem) !
State augmentation approach (a model bias example) Control variable for the analysis cycle k: Solve EnKF equations (or EnsDA) equations in terms of control variable z and forecast model F : Parameter estimation is a special case of state augmentation approach! Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
4DVAR framework Forecast error covariance Observations First guess Data assimilation (Init. Cond. and Model Error adjust.) Init. Cond. and Model Error opt. estimates EnsDA framework Forecast error covariance Observations First guess Data assimilation (Init. Cond. and Model Error adjust.) Analysis error Covariance (in ensemble subspace) Init. Cond. and Model Error opt. estimates Ens. forecasting In EnsDA framework model error does not depend on assumptions regarding forecast error covariance; data assimilation problem is solved in ensemble subspace
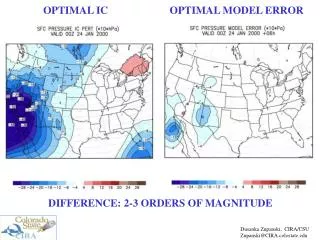
ETA 4DVAR: Surface pressuremodel error time evolution (every 2-h over a 12-h data assimilation interval) From Zupanski et al. 2004 (submitted to MWR) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
RAMS 4DVAR: Exner functionmodel error time evolution (lev=5km), every 2-h From Zupanski et al. 2004 (submitted to MWR) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Eta: Horizontal windmodel error time evolution (lev=250hPa), every 2-h Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
RAMS: Horizontal windmodel error time evolution (lev=250hPa), every 2-h Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
RAMS: Horizontal windmodel error, vertical cross-section, every 2-h Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
EnsDA experiments with Korteweg-de Vries-Burgers (KdVB) model - one-dimensional model - includes non-linear advection, diffusion and dispersion PARAMETER estimation impact From Zupanski and Zupanski 2004 (submitted to MWR) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
EnsDA experiments with KdVB model Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Kalman Filter statistical verification toolsInnovation statistics Innovation vector =obs – first guess • c2 statistics – can be used to test the stability of an ensemble filter Pf – produced by Ensemble Filter algorithm R – input to Ensemble Filter algorithm The conditional mean of c2 (normalized by obs) should be equal to one • Innovation histogram – Probability Density Function of normalized innovation vectors For Gaussian distribution, and with linear observation operator H, the innovation histogram should be equal to standard normal distribution N (0,1)
EnsDA experiments with KdVB model (PARAMETER estimation impact) 10 obs 101 obs
EnsDA experiments with KdVB model (PARAMETER estimation impact) It would be BEST to have a perfect model, but since this is not the case, it is necessary to estimate model error and use it to correct the model!
EnsDA experiments with KdVB model BIAS estimation results BIAS estimation may require many observations and large ensemble size ! A feasible solution to reduce the number of degrees of freedom is to define bias in terms of small number of parameters.
EnsDA experiments with KdVB model Analysis error covariance matrix (UNCERTAINTY estimate) From Zupanski and Zupanski 2004 (submitted to MWR) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
We are employing more and more models! NASA’s GEOS column model • Work in progress in collaboration with: • A. Hou and S. Zhang (NASA/GMAO) • C. Kummerow (CSU/Atmos. Sci.) Preliminary results including parameter estimation: R1/2 = e R1/2 = 2e Choice of observation errors directly impacts innovation statistics. Observation error covariance R is the only given input to the system!
Q: What is data assimilation? A: • Method of defining optimal initial conditions (classic definition) • Model error estimation method • Model development tool (estimate and correct model errors during the model development phase) • PDF estimation Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
CONCLUSIONS • To employ full data assimilation power, model error estimation should be included • EnsDA approaches are very promising since they can provide not only optimal estimate of the atmospheric state, but the uncertainty of the estimate as well FUTURE WORK • Estimate and correct model errors for various models (GEOS, RAMS, WRF, etc.) Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu
An example: Equivalence between variational and Kalman filter equations (for linear models and Gaussian statistics)
An example (continued): Using the matrix equality (e. g., Jaswinski 1970, Appendix 7b: We obtain the Kalman filter analysis equation: Important difference: variational methods DO NOT provide forecast error covariance update (update of P)! Dusanka Zupanski, CIRA/CSU Zupanski@CIRA.colostate.edu