Download
1 / 27
270 likes | 285 Views
Learn about skeletons, bones, joints, and the process of skinning in skeletal animation. Understand how to pose and manipulate a skeleton, and how it affects the deformation of the character's skin. Discover different joint types and their degrees of freedom. Explore the limitations of smooth skin and the use of bone links and containment binding. Also, learn about handling props in animation.

E N D
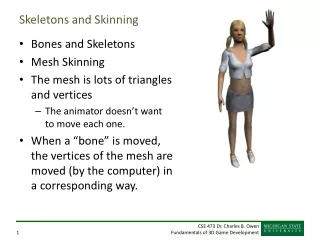
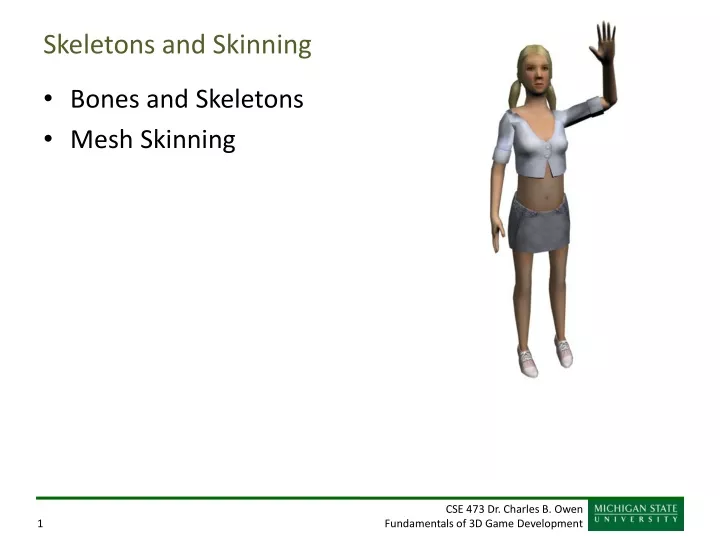
Skeletons and Skinning • Bones and Skeletons • Mesh Skinning
Skeletal Animation Victoria
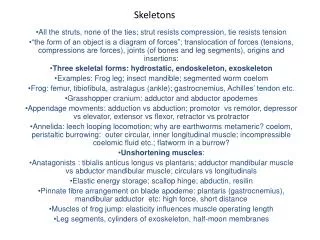
Skeletons Skeleton A pose-able framework of joints arranged in a tree structure. An invisible armature to manipulate the skin and other geometric data of the character. Does not actually render.
Skeleton bones are identical in function to the bones you used for Digger. Skeletons Joint Allows relative movement within the skeleton. Joints are equivalent to 4x4 matrix transformations. Bone What’s the difference between a joint and a bone? Nothing really, and XNA uses the term bone for a joint. Sometimes bones includes a length or actual geometry
DOFs Degree of Freedom (DOF) A variable φ describing a particular axis or dimension of movement within a joint Joints typically have around 1-6 DOFs (φ1…φN) Can have more (up to 9 for affine) Changing the DOF values over time results in the animation of the skeleton Rigid body transformations: 6DOF Arbitrary rotations: 3DOF TT
1-2 is what we did for Digger. #3 is new. Skeleton Posing Process • Specify DOF values for the skeleton • Traverse the hierarchy using forward kinematics to compute the world matrices • Use world matrices to deform skin & render The matrices can also be used for other things such as collision detection, FX, props, etc.
Forward Kinematics • Each joint computes a local matrix M based on the DOFs and some formula representative of the joint type: Local matrix M = Mjoint(φ1,φ2,…,φN) boneTransforms[b] = Matrix.CreateScale(boneScales[b]) * Matrix.CreateFromQuaternion(bone.Rotation) * Matrix.CreateTranslation(bone.Translation); • Then, world matrix W is computed by concatenating M with the world matrix of the parent joint World matrix W = MWparent model.CopyBoneTransformsFrom(boneTransforms); model.CopyAbsoluteBoneTransformsTo(boneAbsoluteTransforms);
Skeleton Rigging • Skeleton Rigging – Setting up the skeleton for a figure • Bones • Joints • DOF’s • Limits
Poses Adjust DOFs to specify the pose of the skeleton We can define a pose Φ more formally as a vector of N numbers that maps to a set of DOFs in the skeleton Φ = [φ1 φ2 … φN]
Rotational Hinge: 1-DOF Universal: 2-DOF Around two axis Ball & Socket: 3-DOF Euler Angles Quaternions Translational Prismatic: 1-DOF Translational: 3-DOF (or any number) Compound Free Screw Constraint Etc. Non-Rigid Scale Shear Etc. Design your own... Joint Types TT
This is what we did with Digger Rigid Parts are Easy • Robots and mechanical creatures • Rigid parts, no smooth skin • Each part is transformed by its joint matrix • Every vertex of the character’s geometry is transformed by exactly one matrix where v is defined in joint’s local space
What happens with Skinned Characters? The mesh is deformed by the bones, but not “rigidly”. Instead, it is a flexible bend.
The Basic Concept 0.5/0.5 0.0/1.0 1.0/0.0 0.7/0.3 Each vertex can be moved by 1-4 bones, with each bone having a weight.
Mathematics of mesh skinning Each vertex is multiplied by several “weighted” transformation matrices and the results are added together. Where: is the number of matrices. is the vertex position. is the weight associated. is a transformation matrix. with The transformation matrix indicates how that bone has been moved. TT
Smooth Skin 0.5/0.5 0.0/1.0 1.0/0.0 0.7/0.3 • A vertex can be attached to more than one joint/bone with adjustable weights that control how much each joint affects it • Rarely more than 4 • Definitely no more than 4 in XNA • Result is a blending of the n transformations • Algorithm names • blended skin, skeletal subspace deformation (SSD), multi-matrix skin, matrix palette skinning…
Limitations of Smooth Skin • Smooth skin is very simple and quite fast, but its quality is limited • Joints tend to collapse as they bend more • Very difficult to get specific control • Unintuitive and difficult to edit • Still, it is common in games and commercial animation! • If nothing else, it is a good baseline upon which more complex schemes can be built
Bone Links • Bone links are extra joints inserted in the skeleton to assist with the skinning • Instead of one joint, an elbow may be 2-3 joints • Allows each joint to limit the bend angle! • Why does this help?
Containment Binding • Volume primitives around the bones • Boxes, cylinders, etc. • Vertex weights assigned based on which primitives it is in
Props Often our characters will be carrying or handling something We usually call this a prop Easiest way to handle props Prop is moved by one bone In this example the right hand bone moves the pie bazooka
How I determined the numbers Matrix bazMat = Matrix.CreateRotationX(MathHelper.ToRadians(109.5f)) * Matrix.CreateRotationY(MathHelper.ToRadians(9.7f)) * Matrix.CreateRotationZ(MathHelper.ToRadians(72.9f)) * Matrix.CreateTranslation(-9.6f, 11.85f, 21.1f) * Model.GetBoneAbsoluteTransform(handBone); X value is +90 to get from 3DS coordinates (Z is up) to our coordinates (Y is up) TT
Manual Manipulation How could I aim that bazooka? What are the options?
Manual Manipulation Bip01 Spine1