Download
1 / 4
40 likes | 166 Views
Robust Inversion using Biweight norm Jun Ji , Hansung University ( visiting the University of Texas at Austin ). SEG 2011 San Antonio. Introduction. Least-squares ( l 2 ) inversion: Sensitive to outliers.

E N D
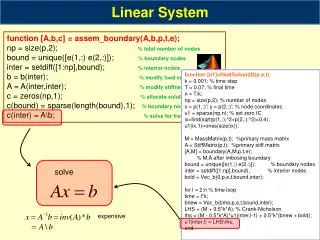
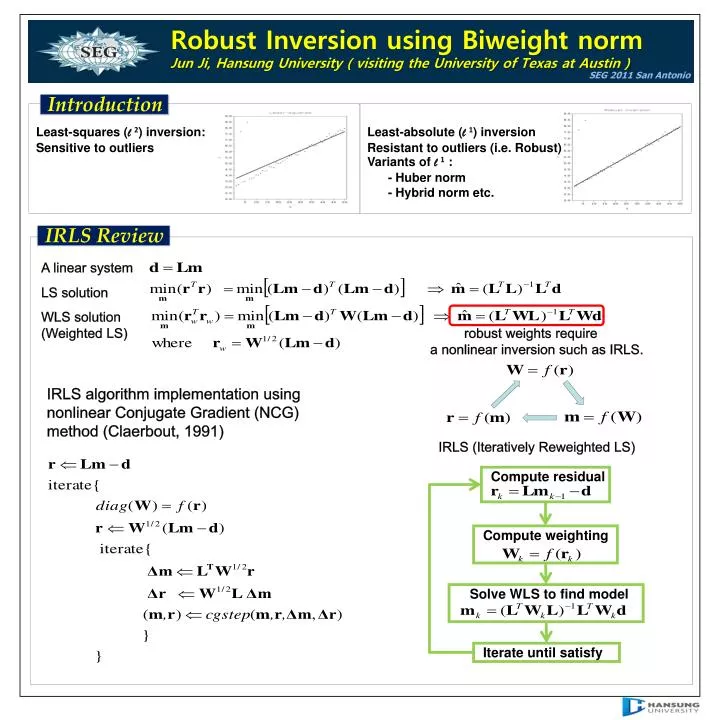
Robust Inversion using Biweight normJun Ji, Hansung University ( visiting the University of Texas at Austin ) SEG 2011 San Antonio Introduction Least-squares (l 2) inversion:Sensitive to outliers Least-absolute (l 1) inversion Resistant to outliers (i.e. Robust)Variants of l 1 : - Huber norm - Hybrid norm etc. IRLS Review A linear system LS solution WLS solution (Weighted LS) robust weights require a nonlinear inversion such as IRLS. IRLS (Iteratively Reweighted LS) IRLS algorithm implementation using nonlinear Conjugate Gradient (NCG) method (Claerbout, 1991) Compute residual Compute weighting Solve WLS to find model Iterate until satisfy
Robust norm : l 1 norm l 1 norm function : Weighting : Robust norm : Huber norm (Huber, 1981) Huber norm function : Weighting : ε= 1.345 x MAD/0.6746 ( ~95% of efficiency for Gaussian Noise) (Holland & Welsch, 1977) Robust norm : Hybrid norm (Bube &Langan, 1977) Hybrid l 1 / l 2 norm function : Weighting : ε ~ 0.6 x σ(Bube &Langan, 1977) Robust norm : Biweight norm (Beaton & Tukey, 1974) Tukey’sBiweight (Bisquare Weight) norm function : Weighting : ε = 4.685 x MAD/0.6745 ( ~95% of efficiency for Gaussian Noise) (Holland & Welsch, 1977) • Problems for Biweight norm IRLS • Local minimum (due to noncovex measure) good initial guess (e.g. Huber norm sol.) would be helpful • Carefully choose the threshold (ε) and do not change during iteration
Properties of different norms Single parameter estimation problem with N observations di Minimize squares of error (l 2 norm) : Minimize absolute of error (l 1 norm): Example data : ( 2, 3, 4, 5, 66 ) => Mean : 16, Median : 4, More robust estimation : ~ 3.5 Examples - Line fitting BG noise : N(µ,σ)=(0, 0.02) Outliers (20% of data) : 2 spikes(4.5,5) + 8 points with N(3,0.1) Example : Hyperbola fitting BG noise : N(0,0.4) Outliers 1) Three spikes : 10 times of signal amplitude 2) A bad trace with N(0,1) 3) 12 bad traces with U(10,2) ~ 10 % of data BG noise : N(0,0.4) Outliers 1) Three spikes of 10 times of signal amplitude 2) A bad trace with N(0,1)
Real data Example Conclusions • IRLS using Biweight norm provides a robust inversion method like the variants of l 1 norm approaches such as l 1 , Huber, and Hybrid norms. • Biweight norm inversion sometimes demonstrates better estimation than the one of l 1 norm variants when outliers are not simple. • For optimum performance • need a good initial guess (e.g. Huber norm solution) to converge to the global minimum • carefully choose threshold (ε) based on noise distribution and do not change during iteration