Download
1 / 21
240 likes | 507 Views
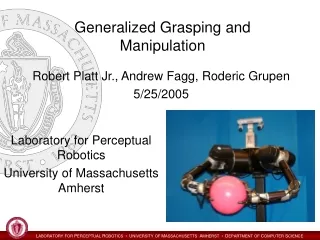
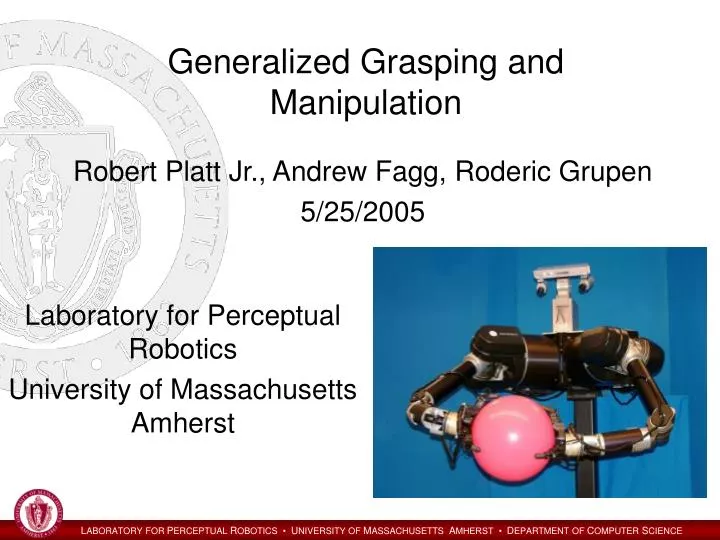
Generalized Grasping and Manipulation. Robert Platt Jr., Andrew Fagg, Roderic Grupen 5/25/2005. Laboratory for Perceptual Robotics University of Massachusetts Amherst. Motivation: Human Grasps.

E N D
Generalized Grasping and Manipulation Robert Platt Jr., Andrew Fagg, Roderic Grupen 5/25/2005 Laboratory for Perceptual Robotics University of Massachusetts Amherst
Motivation: Human Grasps from Mark Cutkosky, On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks, IEEE TRA Vol 5, No. 3, June 1989
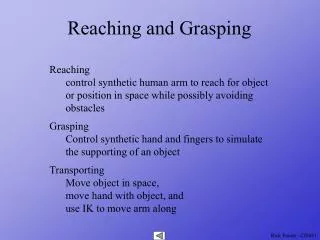
Outline • Grasp control • Control-based dexterous manipulation • Transport and grasp schemas (skills)
Opposition Space from The Grasping Hand, C. MacKenzie, T. Iberall, Springer, 1994
Contact Parameterization of Grasp 1,2,3 f palm, fingertips grasp 1,2,3 f grasp palm, fingertips left, right f grasp left, right left f grasp left, gravity Platt, R., Fagg, A., Grupen R., 2003
f grasp Grasp Control: Grasp artificial potential displaces contacts to descend wrench-closure error function: Coelho, J., Grupen, R., 1997; Platt, R., Fagg, A., Grupen R., 2002
Sliding Grasp Control Video f f f Sliding Grasp Controller: g k f
f f f f f m k g Four Control Primitives grasp control collision free motion kinematic conditioning force control
Combining Control Primitives Carry: f f f f m k f g Grasp: f f f g k f Platt, R., Fagg, A., Grupen R., 2004
Controller Equivalence Classes: Common Suffix common suffix f f f f m k f g f f f f k k f g f f f f g k f g Platt, R., Fagg, A., Grupen R., 2004
Definition of Schema The Action Schema defines: • “Abstract” states and actions • A deterministic policy through the abstract space to the schema goal • A one-to-many mapping from the abstract policy onto instantiations in the underlying system. Subject of learning: • What instantiations are appropriate in what execution contexts?
Localize-Reach-Grasp P(transition | blob parameters)
Reach Primitives Position Orientation
Pilot Results: Learning Curves (results averaged over three experiments.)