Download
1 / 16
250 likes | 491 Views
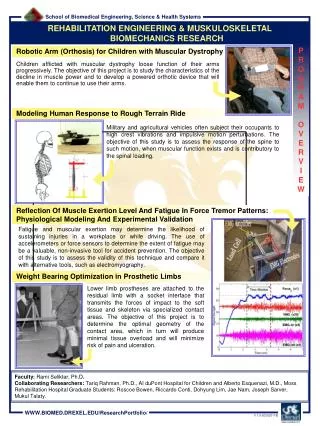
A Mobile Robotic Arm for People with Severe Disabilities. Authors : Hideyuki Uehara Hiroki Higa Takashi Soken. Speaker :李宗明 M99G0103. Proceedings of the 2010 3rd IEEE RAS & EMBS

E N D
A Mobile Robotic Arm for People with Severe Disabilities Authors: Hideyuki Uehara Hiroki Higa Takashi Soken Speaker :李宗明 M99G0103 Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, The University of Tokyo, Tokyo, Japan, September 26-29, 2010
Outline • Introduction • System configuration • Methods • Results and discussion • Conclusion
Introduction • By the cause of stroke or spinal cord injury, there are many people who have paralyzed extremities and who need someone’s help. Some of them have strong-minded to be independent of others and to live their own lives. • In step with the advances in medical technology, people live longer than they used to. Some of nursing care helpers are getting older and it is difficult for them to take good care of people with disabilities due to their advanced ages.
Introduction • Some robots for assistive technology have been developed. But those robots are too large and heavy to use in a restricted housing environment. • It is difficult for those with disabilities to purchase and maintain them. In addition, they can hardly have their meals out with these robots.
Introduction • To realize and to provide a low-cost and useful mobile robotic arm system for people with severe disabilities to drinking tea task and eating task.
System configuration • System configuration of mobile robotic arm for people with severe disabilities.
System configuration • Seven degrees of freedom robotic arm
System configuration • Mobile robotic arm specifications
System configuration • Gripper (a) when closing, and (b) when grasping a 350-ml can. The gripper is detachable from the main body.
System configuration • Controller for people with disabilities
Methods • Drinking tea task:The subject was required to drink teawith the mobile robotic arm.
Methods • Experimental result of drinking tea task. The elapsed time was indicated in each image at the upper left corner.
Methods • Eating task:The subject was asked to eatsome foodswith the mobile robotic arm.Such as rice gruel, porridge, Chinese dumpling and shomai.
Methods • Experimental result of eating task. The elapsed time was indicated in each image at the upper left corner.
Results and discussion • The elapsed time for drinking tea was 25 s. The subject made no error in operation during this task. the subject could appropriately drink tea with the mobile robotic arm system. • From the experimental result, it was found that system allowed users to have their meals at their paces and to use the commercial spoon and fork when eating.
Conclusion • This system is low-power, small, cost-effective, and excellent real-time interrupt response. It is embedded to the system. • Those with severe disabilities will be more comfortable to manipulate this system, which leads to a better option for them. An optimum controller for the mobile robotic arm system is under ongoing consideration.