Download
1 / 86
960 likes | 1.24k Views
Moving Target Indicator Radar (MTI). Clutter is the term used for radar targets which are not of interest to the user. Clutter is usually caused by static objects near the radar but sometimes far away as well:. n. n. n. n. Moving Target Indicator Radar (MTI).

E N D
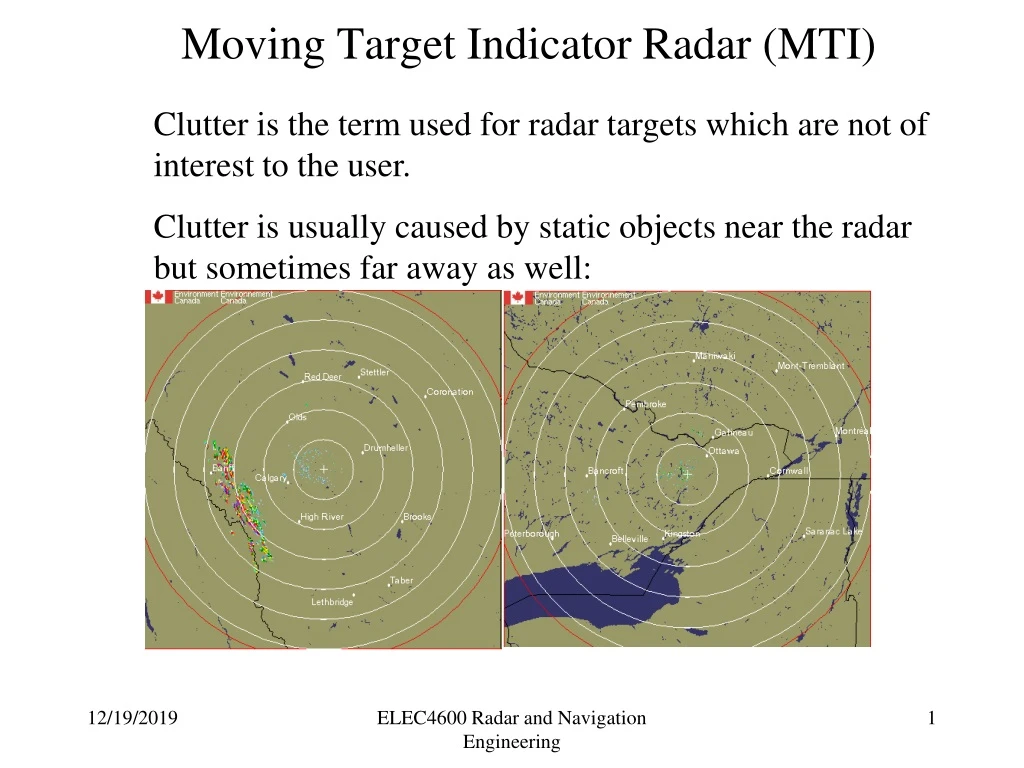
Moving Target Indicator Radar (MTI) Clutter is the term used for radar targets which are not of interest to the user. Clutter is usually caused by static objects near the radar but sometimes far away as well: n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Sometimes clutter can be caused by sidelobes in the antenna pattern or a poorly adjusted antenna n n In any case it is desirable to eliminate as much clutter as possible n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) This is done by using the fact that the desired target is usually moving relative to the radar and thus causes a Doppler shift in the return signal. The Doppler shift can also be used to determine the relative speed of the target. n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The simple CW example can be modified to incorporate pulse modulation n n n Note that the same oscillator is used transmission and demodulation of the return Thus the return is processed coherently i.e. the phase of the signal is preserved n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The transmitted signal is and the received signal is these are mixed and the difference is extracted n n n This has two components, one is a sine wave at Doppler frequency, the other is a phase shift which depends on the range to the target, R0 n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Note that for stationary targets fd = 0 so Vdiff is constant Depending on the Doppler frequency one two situations will occur n n n fd>1/τ n fd<1/τ ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Note that for a pulse width of 1μs, the dividing line is a Doppler shift of 1 MHz. If the carrier frequency is 1 GHz, this implies a relative speed of 30,000 m/s Thus all terrestrial radars operate in a sampled mode and thus are subject to the rules of sampled signals e.g. Nyquist’s criterion We shall also see that we can use Discrete Sample Processing (DSP) to handle some of the problems n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Looking a successive oscilloscope displays of radar receiver output we see: At the ranges of the two targets, the return ampliude is varying as the radar samples the (relatively) slow Doppler signal. The bottom trace shows what would be seen in real time with the moving targets indicated by the amplitude changes n n n n ELEC4600 Radar and Navigation Engineering
- z-1 Moving Target Indicator Radar (MTI) We usually want to process the information automatically. To do this we take advantage of the fact that the amplitudes of successive pulse returns are different: n n OR n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) MTI Radar Block Diagrams MOPA (master oscillator, power amplifier) • Power amplifiers: • Klystron • TWT (Travelling wave tube) • Solid State (Parallel) n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) One of the problems with MTI in pulsed radars is that magnetrons are ON/OFF devices. i.e. When the magnetron is pulsed it starts up with a random phase and is thus its ouput is not coherent with the pulse before it. Also it can not provide a reference oscillator to mix with the received signals. Therefore some means must be provided to maintain the coherence (at least during a single pulse period) n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) n n PLL n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The notes have a section on various types of delay line cancellers. This is a bit out of date because almost all radars today use digitized data and implementing the required delays is relatively trivial but it also opens up much more complex processing possibilities n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The Filtering Characteristics of a Delay Line Canceller The output of a single delay canceller is: n n This will be zero whenever πfdT is 0 or a multiple of π The speeds at which this occurs are called the blind speeds of the radar . n n where n is 0,1,2,3,… ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) If the first blind speed is to be greater than the highest expected radial speed the λfp must be large large λ means larger antennas for a given beamwidth large fp means that the unambiguous range will be quite small So there has to be a compromise in the design of an MTI radar n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The choice of operating with blind speeds or ambiguous ranges depends on the application Two ways to mitigate the problem at the expense of increased complexity are: a. operating with multiple prfs b. operating with multiple carrier frequencies n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Double Cancellation: Single cancellers do not have a very sharp cutoff at the nulls which limits their rejection of clutter (clutter does not have a zero width spectrum) Adding more cancellers sharpens the nulls n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Double Cancellation: There are two implementations: n n n These have the same frequency response: which is the square of the single canceller response n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Double Cancellation: n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Transversal Filters These are basically a tapped delay line with the taps summed at the output n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Transversal Filters To obtain a frequency response of sinnπfdT, the taps must be binomially weighted i.e. n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Filter Performance Measures MTI Improvement Factor, IC Note that this is averaged over all Doppler frequencies n Signal Clutter n n Filter n 0 1/2T 0 1/2T ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) • Filter Performance Measures • Clutter Attenuation ,C/A • The ratio of the clutter power at the input of the canceler • to the clutter power at the output of the canceler • It is normalized, (or adjusted) to the signal attenuation of the canceler. • i.e. the inherent signal attenuation of the canceler is ignored n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) • Transversal Filters with Binomial Weighting with alternating sign • Advantages: • Close to optimum for maximizing the Clutter improvement factor • Also close to maximizing the Clutter Attenuation • Cin/Cout n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) • Transversal Filters with Binomial Weighting with alternating sign • Disadvantage: • As n increases the sinn filter cuts off more and more of the spectrum around DC and multiples of PRF • This leads to wider blind speed zones and hence loss of legitimate targets. n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The ideal MTI filter should reject clutter at DC and th PRFs but give a flat pass band at all other frequencies. The ability to shape the frequency response depends to a large degree on the number of pulses used. The more pulses, the more flexibility in the filter design. Unfortunately the number of pulses is limited by the scan rate and the antenna beam width. Note that not all pulses are useful: The first n-1 pulses in an n pulse canceler are not useful n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Some other transversal filter responses are shown: n n n (1) 3 pulse canceler (2) 5 pulse “optimum” filter which maximizes IC (3) 15 pulse Chebyshev filter n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Feed forward (finite impulse response or FIR) filters have only poles (one per delay) More flexibility in filter design can be obtained if we use recursive or feedback filters (also known as infinite impulse response or IIR filters) These have a zero as well as a pole per delay and thus have twice as many variables to play with ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) IIR filters can be designed using standard continuous-time filter techniques and then transformed into the discrete form using z transforms Thus almost any kind of frequency response can be obtained with these filters. They work very well in the steady state case but unfortunately their transient response is not very good. A large pulse input can cause the filter to “ring” and thus miss desired targets. Since most radars use short pulses, the filters are almost always in a transient state ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Multiple PRFs An alternative is to use multiple PRFs because the blind speeds (and hence the shape of the filter response) depends on the PRF and, combining two or more PRFs offers an opportunity to shape the overall response. ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Multiple PRFs: Example Two PRFs Ratio 4/5 First blind speed is at 5/T1 or 4/T2 ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Multiple PRFs: Example Four PRFs Ratio 25/30/27/31 First blind speed is at about 28.25/TAV where TAV is the average period of the four PRFs ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Multiple PRFs: Example Calculation of First Blind Speed if the relationship between the Pulse Periods is and vB is the first blind speed of a PRF with average period The first blind speed is ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Multiple PRFs can also be used with transversal filters Example 5 pulse canceler with 4 staggered PRFs n n n n ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Digital (or Discrete) Signal Processing (DSP) These days almost all radar signal processing is done using DSP. The down-converted signal is sampled by an A/D converter as follows: Note: The quadrature channel removes blind phases ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) • Advantages of DSP • greater stability • greater repeatability • greater precision • greater reliability • easy to implement multiple PRFs • greater flexibility in designing filters • gives the ability to change the system parameters dynamically ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Digital (or Discrete) Signal Processing (DSP) Note that the requirements for the A/D are not very difficult to meet with today’s technology. Sampling Rate Assuming a resolution (Rres)of 150m, the received signal has to be sampled at intervals of c/2Rres = 1μs or a sampling rate of 1 MHz Memory Requirement Assuming an antenna rotation period of 12 s (5rpm) the storage required would be only 12 Mbytes/scan. ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Digital (or Discrete) Signal Processing (DSP) Quantization Noise The A/D introduces noise because it quantizes the signal The Improvement Factor can be limited by the quantization noise the limit being: This is approximately 6 dB per bit A 10 bit A/D thus gives a limit of 60 dB In practice one or more extra bits to achieve the desired performance ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Digital (or Discrete) Signal Processing (DSP) Dynamic Range This is the maximum signal to noise ratio that can be handled by the A/D without saturation N= number of bits k=rms noise level divided by the quantization interval the larger k the lower the dynamic range but k<1 results in reduction of sensitivity Note: A 10 bit A/D gives a dynamic range of 45.2dB ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Blind Phases If the prf is double the Doppler frequency then every othyer pair of samples cane be the same amplitude and will thus be filtered out of the signal. By using both inphase and quadrature signals, blind phases can be eliminated ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Blind Phases If the prf is double the Doppler frequency then every other pair of samples can be the same amplitude and will thus be filtered out of the signal. (loss of 2.8dB and 13.7dB for Pd of 0.5 and 0.9 respectively) By using both inphase and quadrature signals, blind phases can be eliminated ELEC4600 Radar and Navigation Engineering
z-1 z-1 z-1 z-1 z-1 z-1 z-1 z-1 w w w w w w w w SUMMER Moving Target Indicator Radar (MTI) Digital Filter Banks and FFT Example: Transversal Filter with 8 delay elements: If the weights are set to: i= 1,2,3…N and k is an index from 0 to N-1 ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The impulse response of this filter is: And from the Fourier transform its frequency response is The magnitude of the response is ELEC4600 Radar and Navigation Engineering
k=0 0 1/T k=1 0 1/T Moving Target Indicator Radar (MTI) ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The response for all eight filters is: ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) The actual response for this filters is: Which is sin (Nx)/sin(x) The sidelobes of this filter are quite large (13dB below peak) and so it is not an ideal implementation ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) Other options are: Uniform weighting and Chebyshev weights Clutter Improvement with Uniform weighting (Filter Bank Only) ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) • Filter Banks can also be preceded by cancelers • In the following cases a 3 pulse canceler ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI) • Filter Banks can also be preceded by cancelers • In the following cases a 3 pulse canceler is used ahead of an 8 pulse Doppler Filter Bank Uniform Chebyschev ELEC4600 Radar and Navigation Engineering
Moving Target Indicator Radar (MTI)MTD (Moving Target Detector) Example: ASR (Airport`Surveillance Radar) Range: 60 NM Antenna Rotation: 12.5 - 15rpm Frequency:2.7 - 2.9 GHz fp: 700 - 1200 Hz Beamwidth: 1.4º Uses a 3 pulse canceller with an 8 pulse doppler filter bank Measured IC = 45dB A/D converter uses 10 bits ELEC4600 Radar and Navigation Engineering