Download
1 / 13
130 likes | 141 Views
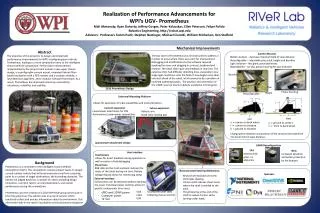
This project aims to wirelessly control a robotic arm and vehicle using electrical signals from muscles (EMG). The EMG signals are sampled and translated into movement commands, allowing individuals with handicapped, amputated limbs, or paralysis to operate the system.

E N D
Background • Who does this project addresses to? • Handicapped. • Amputated limbs. • Paralyzed. • Motivation Statistics
Project’s Goals The objective of this project is to drive a robotic arm and vehicle wirelessly by moving certain muscles in the body. An important attribute of this system is a correct sample of electrical signals from muscles (EMG) and the translation of these signals into an action.
Demonstration Link
Design Stages • Create interface between radio transmitter and microcontroller. • Control the robotic arm & vehicle by microcontroller. • Design and build Amplifying and Filtering circuit. • Sample the EMG signal and translate it to movement commands.
The EMG Signal • An EMG signal is a small electrical current that is released when a muscle is contracted. • The EMG signal can be read or measured by placing conductive elements or electrodes on skin surface. • The voltage level of the signal is 0.01-10mV at freq range of 0-500Hz
Filter & Amplifier Circuit • Uses Instrumentation Amplifier and Universal Active Filter. • Amplifies the low measured signal to make it suitable for a sample. • Filters Background noise.
Micro Controller - Pic18 • A/D-Sample a analog signal that already been filtered and amplified. • The resolution- 10 bit, 4.88mV/bit. • Create interface to radio transmitter • PWM signal. Long Sync Pulse 5v Ch 1 Ch 2 Ch 3 Ch 4 Ch 5 0v Sync Pulse Sync Pulse Sync Pulse Sync Pulse Sync Pulse Sync Pulse
Micro Controller - Pic18 EMG Signal
Communication System • Laser 4 Remote control • Receives the signal from microcontroller. • Modulates and transmit 72MHz FM modulated signal. • The Hitec HFD-08RO receiver • Located on the mobile vehicle • Demodulates the FM Signal • Parsers the received data to 8 channel
Robotic Arm &Vehicle • The robotic arm is based on Hi-Tech servo motors. • The angel of the motor is determined by the width of the PWM it gets. • The robotic arm controlled by 5 PWM channels (have 5 motors). • 4X4 weal drive vehicle controlled by 2 PWM channels.
Digital Camera & Monitor • The camera is tracking the movement of the robot and sending a PAL video signal at 2.4GHz. • The monitor has an internal video receiver with LCD screen and Video and Audio outputs.
Future research • Working a circuit board (will reduce noise ). • Reducing size of communication system. • Working in frequency domain with DSP processor . • Reduce energy consumption. • Integrate EEG-electric signals from the brain.