Download

1 / 18
190 likes | 314 Views
Using crowd-control simulations to predict behavior of motile organisms . John E. Fauth Department of Biology Rex Oleson Institute for Simulation & Training (IST) D. J. Kaup Department of Mathematics & IST Linda Malone Department of Industrial Engineering & Management Systems Tom Clarke

E N D
Using crowd-control simulations to predict behavior of motile organisms John E. Fauth Department of Biology Rex Oleson Institute for Simulation & Training (IST) D. J. Kaup Department of Mathematics & IST Linda Malone Department of Industrial Engineering & Management Systems Tom Clarke Institute for Simulation & Training (IST) University of Central Florida, Orlando, FL 32816
Simulation Model • Goals of simulation: Understand and predict behaviors of organisms in complex environments • Social Potential Models 1. Flocking 2. Helbing-Molnar-Farkas-Vicsek 3. Lakoba-Kaup-Finkelstein Model
Social Potential Models • Main use is path planning and obstacle avoidance • Used for robot motion • ci,jis a strength coefficient • ri,j is the radial distance • i,j is the inverse power
1. Flocking Model • Fluid-like motion built up from a series of independent entities • Each entity acts on its own local perception of the world • Based on 3 potentials • collision avoidance • velocity matching • flock centering
Social forces Physical forces (repulsion/attraction) (pushing, friction) + 2. Helbing-Molnar-Farkas-Vicsek (HMFV) Model • Hybrid model that combines social forces and physical forces: • Successfully modeled certain aspects of pedestrian motion • Faster is slower effect.
3. Lakoba-Kaup-Finkelstein (LKF) Model • Adjusted values of HMFV model to be physically correct. • Included additional social parameters required for realism. • Ability to learn and forget about location of an exit and walls. • Knowledge of locations is used to determine: • Direction in which a pedestrian is looking. • Attraction force to the exit (similarly, repulsion from walls). • Correctly reproduces realistic collective and individual behaviors.
LKF Model • Equations are stiff Code has to resolve two disparate scales: • LARGE: distances about the size of the room ( ~ 10 m). • Small: distance between pedestrians when they come into contact ( ~ 1 cm). • New overlap algorithm developed to eliminate overlap among pedestrians. This allows stable solutions using the explicit 1st-order Euler method.
Generalizing the concept • Lakoba et al. developed crowd-control models to understand the collective behavior of pedestrians • Goal: understand and modify crowd behavior to reduce fatalities during emergencies: nightclub fires, stadium accidents, and subway or building bombings and other terrorist acts. • Method is generalizable to other motile, multicellular organisms.
Niche partitioning in salamanders • Niche partitioning is a core concept in ecology. • Environmental gradients (ecotones) are common in nature. • Salamanders are an ideal model system. • Long history of research on plethodontid salamanders.
Prior field experiments • Manipulated the presence and absence of several species of plethodontid salamanders: • Desmognathus, Plethodon, Eurycea, Gyrinophilus, Pseudotriton • Analyzed survival, growth, and microhabitat use of species along the aquatic-terrestrial ecotone.
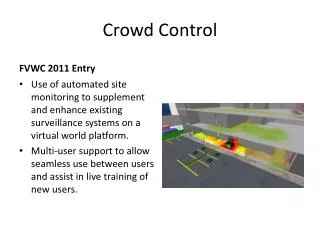
Model Environment cover objects Aquatic Terrestrial
Social forces physical forces (repulsion/attraction) (pushing, friction) + Salamander Parameters • Regional Affinity (= microhabitat preference) • Cover Attraction • Cover Memory Attraction (~ site fidelity) • Food Attraction • Water Attraction • Salamander to Salamander Repulsion • No physical forces
} enhances survival } shifts niches Predictions from Simulation • Parameters most important for producing niche partitioning (in order of importance): • Regional Affinity: yields microhabitat preference • Cover Attraction • Cover Memory Attraction • Food Attraction • Water Attraction • Salamander to Salamander Repulsion: • Yields one salamander per cover object • Move to cover when threatened.
Conclusions • LKF Model yields specific predictions about forces driving niche partitioning, microhabitat shifts, and survival. • Input to simulations was only qualitative. • Output of simulations is quantitative. • Model is flexible and can be customized to diverse ecological scenarios.
Future research • Interactions among different species of salamanders along differing environmental gradients. • Behavior of animals using ecopassages. • Dynamics of coral settlement on eutrophic and more pristine reefs.