Download
1 / 1
10 likes | 138 Views
Multi-subject spatial filtering in brain-computer interfaces Dieter Devlaminck 1 , Bart Wyns 1 , Patrick Santens 2 , Georges Otte³ 1 Ghent University, dept. of Electrical Energy, Systems and Automation 2 University Hospital Ghent, dept. of Internal Diseases ³ P.C. Dr. Guislain.

E N D
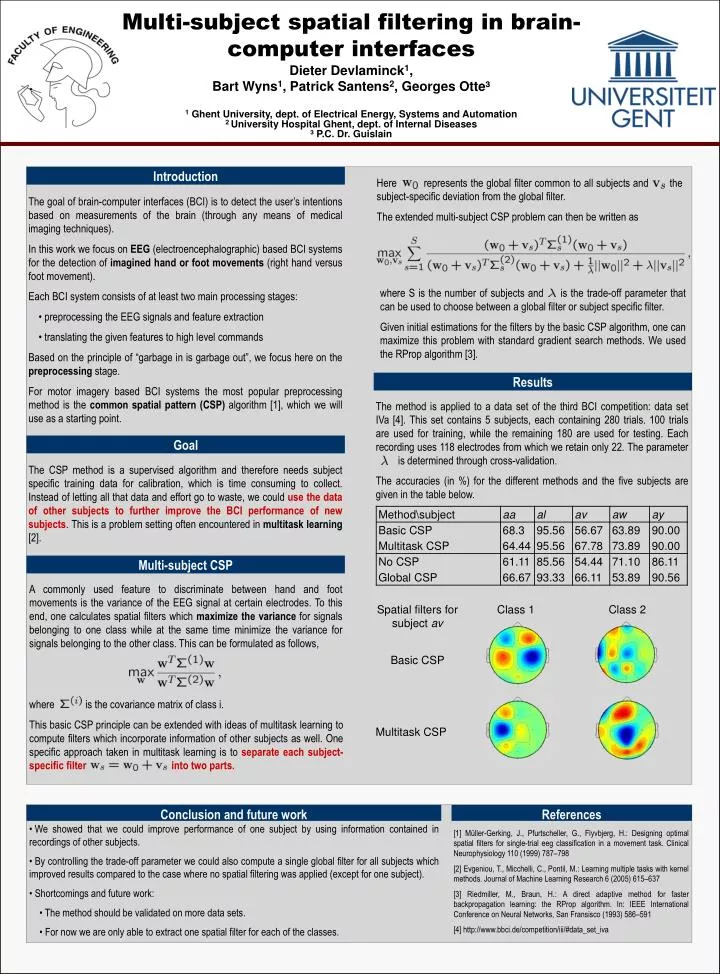
Multi-subject spatial filtering in brain-computer interfaces Dieter Devlaminck1, Bart Wyns1, Patrick Santens2, Georges Otte³ 1 Ghent University, dept. of Electrical Energy, Systems and Automation 2 University Hospital Ghent, dept. of Internal Diseases ³ P.C. Dr. Guislain OPTIONALLOGO HERE Introduction Here represents the global filter common to all subjects and the subject-specific deviation from the global filter. The extended multi-subject CSP problem can then be written as • The goal of brain-computer interfaces (BCI) is to detect the user’s intentions based on measurements of the brain (through any means of medical imaging techniques). • In this work we focus on EEG (electroencephalographic) based BCI systems for the detection of imagined hand or foot movements (right hand versus foot movement). • Each BCI system consists of at least two main processing stages: • preprocessing the EEG signals and feature extraction • translating the given features to high level commands • Based on the principle of “garbage in is garbage out”, we focus here on the preprocessing stage. • For motor imagery based BCI systems the most popular preprocessing method is the common spatial pattern (CSP) algorithm [1], which we will use as a starting point. where S is the number of subjects and is the trade-off parameter that can be used to choose between a global filter or subject specific filter. Given initial estimations for the filters by the basic CSP algorithm, one can maximize this problem with standard gradient search methods. We used the RProp algorithm [3]. Results The method is applied to a data set of the third BCI competition: data set IVa [4]. This set contains 5 subjects, each containing 280 trials. 100 trials are used for training, while the remaining 180 are used for testing. Each recording uses 118 electrodes from which we retain only 22. The parameter is determined through cross-validation. The accuracies (in %) for the different methods and the five subjects are given in the table below. Goal The CSP method is a supervised algorithm and therefore needs subject specific training data for calibration, which is time consuming to collect. Instead of letting all that data and effort go to waste, we could use the data of other subjects to further improve the BCI performance of new subjects. This is a problem setting often encountered in multitask learning [2]. Multi-subject CSP A commonly used feature to discriminate between hand and foot movements is the variance of the EEG signal at certain electrodes. To this end, one calculates spatial filters which maximize the variance for signals belonging to one class while at the same time minimize the variance for signals belonging to the other class. This can be formulated as follows, where is the covariance matrix of class i. This basic CSP principle can be extended with ideas of multitask learning to compute filters which incorporate information of other subjects as well. One specific approach taken in multitask learning is to separate each subject-specific filter into two parts. Conclusion and future work References • We showed that we could improve performance of one subject by using information contained in recordings of other subjects. • By controlling the trade-off parameter we could also compute a single global filter for all subjects which improved results compared to the case where no spatial filtering was applied (except for one subject). • Shortcomings and future work: • The method should be validated on more data sets. • For now we are only able to extract one spatial filter for each of the classes. [1] Müller-Gerking, J., Pfurtscheller, G., Flyvbjerg, H.: Designing optimal spatial filters for single-trial eeg classification in a movement task. Clinical Neurophysiology 110 (1999) 787–798 [2] Evgeniou, T., Micchelli, C., Pontil, M.: Learning multiple tasks with kernel methods. Journal of Machine Learning Research 6 (2005) 615–637 [3] Riedmiller, M., Braun, H.: A direct adaptive method for faster backpropagation learning: the RProp algorithm. In: IEEE International Conference on Neural Networks, San Fransisco (1993) 586–591 [4] http://www.bbci.de/competition/iii/#data_set_iva