Download
1 / 11
110 likes | 118 Views
Sesam user course. SIMA Dynamic Positioning. Dynamic positioning in SIMO. Two models implemented Kalman filter – based on old (1981) software from Kongsberg Maritime PID controller – simpler, less accurate than properly tuned Kalman filter Dynamic positioning in SIMO is not easy.

E N D
Sesam user course SIMA Dynamic Positioning
Dynamic positioning in SIMO • Two models implemented • Kalman filter – based on old (1981) software from Kongsberg Maritime • PID controller – simpler, less accurate than properly tuned Kalman filter • Dynamic positioning in SIMO is not easy
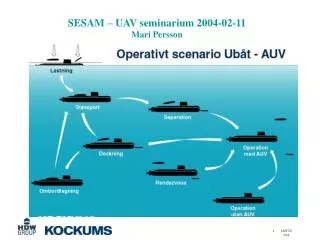
Kalman filter flowchart Waves Wind Mooring Current Vessel/SIMO Position measurements + - Total position Kalman filter Sensor Thrusters RKMAT LF position and velocity + Reference position Allocation GMAT -
Separate mathematical vessel model in parallel with vessel/SIMO Input to vessel model is mass and drag parameters LF and HF model RKMAT updates model based on differences between measured and estimated model GMAT is multiplied with position and velocity error to give input to thruster allocation Kalman filter
Thruster data in SIMA • Thruster types • Fixed conventional • Fixed ducted • Fixed tunnel • Rotatable conventional • Rotatable ducted • Open main propeller • Ducted main propeller
DP Controllers • Positioning • Force allocation
DP Controllers • Control configuration • Filter details
Kalman filter tips • Check time series of DP system variables (performed in DYNMOD) • Current/bias force estimators shall decay slowly towards stable values, if not reduce current/bias gains • Initially, do not use limitations on thrust capacity (introduces a non-linearity in the vessel model) • Start with small feedback gains (GMAT = -0.005*AM) • Perform decay tests • Switch off environment and move vessel from reference position (in STAMOD). Calculate motion in DYNMOD and plot results.
PID controller flowchart Waves Wind Mooring Current Position measurements Vessel/SIMO Total position + PID Sensor - Thrusters Allocation Reference position
PID controller • Includes numerical filter for position measurements • Detailed instructions for tuning in manual
The world-leading provider of software for a safer, smarter and greener future