Download
1 / 23
230 likes | 425 Views
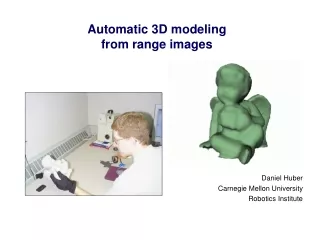
Automatic Image Alignment for 3D Environment Modeling. Nathaniel Williams Kok-Lim Low Chad Hantak Marc Pollefeys Anselmo Lastra. Motivation: Real World Models. Forensics. Education. Historical Preservation. The Problem: Multiple Sensors.

E N D
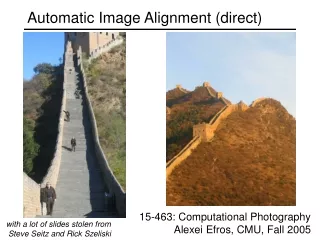
Automatic Image Alignment for 3D Environment Modeling Nathaniel Williams Kok-Lim Low Chad Hantak Marc Pollefeys Anselmo Lastra
Motivation: Real World Models Forensics Education Historical Preservation
The Problem: Multiple Sensors • Digital Camera: 2D color images • Laser Scanner: 2D range map stores reflectance and depth
The Problem: Alignment • Manual alignment is very time consuming • 5-10 minutes per image • Modeling one room may require 10 scans and 100 images • Multi-sensor alignment is difficult to automate • Differences in sampling EM spectrum, illumination, occlusion, etc.
Our Approach • Obtain an initial estimate of the correct alignment • Recast 2D to 3D registration into a fast 2D image-based process • Refine the initial alignment by optimizing the chi-square test
Previous Approaches • Align medical images (e.g. CT, MR) by maximizing mutual information • Viola & Wells [1995], Collignon et al, [1995], etc. • Correlate edges in image & range map • McAllister, Nyland, Popescu, Lastra, & McCue [1999] • Align by comparing object silhouettes • Lensch, Heidrich, & Seidel [2000] • Global optimization of chi-square test • Boughorbal et al [1999, 2000]
Data Acquisition • Acquire range maps and color images of the environment • Need more scans in complex scenes • Annotate all data with initial estimates of the alignment
Initial Pose Estimation [1] • Constrain the sensors’ positions • Rigidly mount camera above scanner • Acquire from same center of projection
Initial Pose Estimation [2] • Track the sensors’ positions • Use an optical tracker to measure the pose of the camera relative to the scanner
Camera & Tracker Calibration • Calculate the orientation of the camera and scanner in the tracker’s coordinate frame • Find the camera’s intrinsic parameters • Tape the lens in place
Data Preprocessing • Correct for image distortion • Convert all range maps into a single polygonal model • Texture map model with laser reflectance • Simplify polygonal model • Reduce millions of triangles by 99% or more
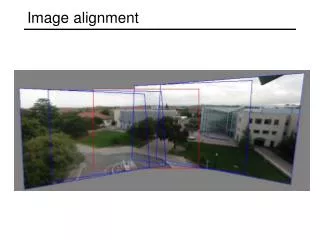
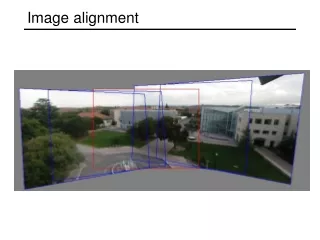
+ Multi-Sensor Data Alignment • Recast 2D to 3D alignment into a fast 2D image-based process • Visualize by projectively texture mapping color image, given pose T
Image Comparison Framework Extract intensity & down-sample - performed once - Reference Image r Color Image Extract from model given pose T - performed often - Floating Image f 3D Model
Reference Image Floating Image Chi-Square Test • Statistical measure of dependence between random variables • Estimate joint probability density from a joint histogram Floating Reference
Optimization • Powell’s multidimensional direction set methods • Performs line minimizations given an initial pose estimate and search direction • The optimization is unconstrained, but the search is local given good initial estimates
Results • UNC Laboratory Model + 2 color images • Data captured from 3 different points of view • 6D optimization: 344 iterations, 28.5sec • Rendering=16% Readback=33% Chi-square=51% Image Model Model + 2 Images
UNC Laboratory Monticello Library Correct Alignment Results • Global optimization can fail on complicated scenes
Conclusions • Initial pose estimation improves the robustness of automatic alignment • Acquiring data from a common COP • No occlusion makes the alignment more robust • Inflexible: camera is mounted on the scanner • Inexpensive: requires a simple bracket • Decoupling the sensors • Flexible: collect more surface information • Expensive: tracking sensors takes more effort
Future Work • Determine the ideal tracking method for initial alignment estimation • Criteria: portability, accuracy, and expense • Experiment with other information metrics and optimization schemes • Investigate error sources • Camera calibration, tracker calibration, etc. • Implement image comparison on graphics hardware
Acknowledgements • Kurtis Keller and John Thomas (UNC) • Rich Holloway and 3rdTech, Inc. • The U.S. National Science Foundation
The End • Questions?